Lineære spændingsstabilisatorer — formål, grundlæggende parametre og koblingskredsløb
Måske i dag kan intet elektronisk bord undvære mindst én kilde til konstant konstant spænding. Og meget ofte tjener lineære spændingsregulatorer i form af mikrokredsløb som sådanne kilder. I modsætning til en ensretter med en transformer, hvor spændingen på den ene eller anden måde afhænger af belastningsstrømmen og kan variere lidt af forskellige årsager, er et integreret mikrokredsløb - en stabilisator (regulator) i stand til at give en konstant spænding i et præcist defineret område på belastningsstrømme.

Disse mikrokredsløb er bygget på basis af felteffekt- eller bipolære transistorer, der kontinuerligt fungerer i aktiv tilstand. Ud over reguleringstransistoren er et styrekredsløb også installeret på krystal af mikrokredsløbet af den lineære stabilisator.
Historisk set, før det blev muligt at fremstille sådanne stabilisatorer i form af mikrokredsløb, var der et spørgsmål om at løse problemet med temperaturstabilitet af parametre, da med opvarmning under drift vil parametrene for mikrokredsløbsknuder ændre sig.
Løsningen kom i 1967, da den amerikanske elektronikingeniør Robert Widlar foreslog et stabilisatorkredsløb, hvor en reguleringstransistor skulle forbindes mellem en ureguleret indgangsspændingskilde og en belastning, og en fejlforstærker med en temperaturkompenseret referencespænding ville være til stede i styrekredsløbet. Som et resultat sprang populariteten af lineære integrerede stabilisatorer på markedet hurtigt.
Tjek billedet nedenfor. Her er vist et forenklet diagram af en lineær spændingsregulator (såsom LM310 eller 142ENxx). I dette skema styrer en ikke-inverterende negativ spændingsfeedback operationsforstærker, ved hjælp af sin udgangsstrøm, graden af oplåsning af reguleringstransistoren VT1, forbundet i et kredsløb med en fælles kollektor - emitterfølger.
Selve op-ampen drives af inputkilden i form af en unipolær positiv spænding. Og selvom den negative spænding ikke er egnet til forsyning her, kan op-ampens forsyningsspænding uden problemer fordobles uden frygt for overbelastning eller skade.
Konklusionen er, at den dybe negative feedback neutraliserer ustabiliteten af indgangsspændingen, hvis værdi i dette kredsløb kan nå 30 volt. Så faste udgangsspændinger spænder fra 1,2 til 27 volt, afhængigt af chipmodellen.
Stabilisatormikrokredsløbet har traditionelt tre ben: input, common og output.Figuren viser et typisk kredsløb af en differentialforstærker som en del af et mikrokredsløb for at opnå en referencespænding Zenerdiode påsat.
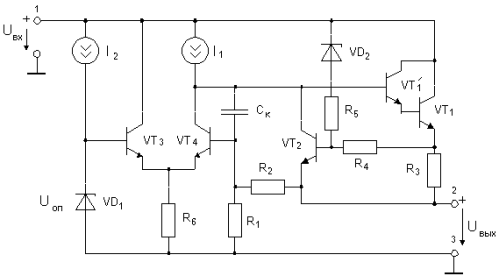
I lavspændingsregulatorer opnås spændingsreferencen ved mellemrummet, som Widlar først foreslog i sin første lineære integrerede regulator, LM109. En divider er installeret i det negative feedback-kredsløb af modstande R1 og R2, ved hvis handling udgangsspændingen viser sig at være ganske enkelt proportional med referencespændingen i overensstemmelse med formlen Uout = Uvd (1 + R2 / R1).
Modstand R3 og transistor VT2 indbygget i stabilisatoren tjener til at begrænse udgangsstrømmen, så hvis spændingen på den strømbegrænsende modstand overstiger 0,6 volt, vil transistor VT2 åbne med det samme, hvilket vil medføre, at basisstrømmen for hovedkontroltransistoren VT1 bliver begrænset. Det viser sig, at udgangsstrømmen i stabilisatorens normale driftstilstand er begrænset til 0,6 / R3. Effekten afgivet af reguleringstransistoren vil afhænge af indgangsspændingen og vil være lig med 0,6 (Uin — Uout) / R3.
Hvis der af en eller anden grund opstår en kortslutning ved udgangen af den integrerede stabilisator, skal den afsatte effekt på krystallen ikke efterlades som før, proportional med spændingsforskellen og omvendt proportional med modstanden R3. Derfor indeholder kredsløbet beskyttelseselementer - zenerdiode VD2 og modstand R5, hvis drift indstiller niveauet for strømbeskyttelse afhængigt af forskellen i spænding Uin -Uout.
I ovenstående graf kan du se, at den maksimale udgangsstrøm afhænger af udgangsspændingen, således er mikrokredsløbet af den lineære stabilisator pålideligt beskyttet mod overbelastning.Når spændingsforskellen Uin-Uout overstiger stabiliseringsspændingen for zenerdioden VD2, vil divideren af modstandene R4 og R5 skabe tilstrækkelig strøm i bunden af transistoren VT2 til at slukke den, hvilket igen vil forårsage grundstrømgrænsen at øge reguleringstransistoren VT1.
De nyeste modeller af lineære regulatorer, såsom ADP3303, er udstyret med termisk overbelastningsbeskyttelse, når udgangsstrømmen falder kraftigt, når krystallen opvarmes til 165 ° C. Kondensatoren i ovenstående diagram er nødvendig for at udligne frekvensen.
Forresten om kondensatorerne. Det er sædvanligt at forbinde kondensatorer med en minimumskapacitet på 100 nf til input og output af de integrerede stabilisatorer for at undgå falsk aktivering af mikrokredsløbets interne kredsløb. I mellemtiden er der såkaldte hætteløse stabilisatorer, såsom REG103, for hvilke der ikke er behov for at installere stabiliserende kondensatorer ved indgang og udgang.
Udover lineære stabilisatorer med fast udgangsspænding findes der også stabilisatorer med justerbar udgangsspænding til stabilisering. I dem mangler divideren af modstandene R1 og R2, og bunden af transistoren VT4 føres ud til et separat ben på chippen til tilslutning af en ekstern divider, såsom i 142EN4 chippen.
Mere moderne stabilisatorer, hvor strømforbruget af styrekredsløbet er reduceret til flere tiere mikroampere, såsom LM317, har kun tre ben.For at være retfærdig bemærker vi, at der i dag også findes højpræcisionsspændingsregulatorer såsom TPS70151, som på grund af tilstedeværelsen af flere ekstra ben gør det muligt at anvende spændingsfaldsbeskyttelse på forbindelsesledningerne, belastningsafladningskontrol osv. .
Ovenfor talte vi om positive spændingsstabilisatorer i forhold til den fælles ledning. Lignende skemaer bruges også til at stabilisere negative spændinger, det er kun nok at galvanisk isolere udgangsspændingen af input fra det fælles punkt. Udgangsstiften forbindes derefter til det fælles udgangspunkt, og det negative udgangspunkt vil være input-minuspunktet forbundet med stabilisatorchippens fællespunkt. Spændingsregulatorer med negativ polaritet som 1168ENxx er meget praktiske.
Hvis det er nødvendigt at opnå to spændinger på én gang (positiv og negativ polaritet), er der til dette formål specielle stabilisatorer, der giver en symmetrisk stabiliseret positiv og negativ spænding på samme tid, det er nok bare at anvende positive og negative indgangsspændinger til inputs. Et eksempel på en sådan bipolær stabilisator er KR142EN6.
Ovenstående figur er et forenklet diagram over det. Her driver differentialforstærkeren #2 transistoren VT2, så ligheden -UoutR1 / (R1 + R3) = -Uop observeres. Og forstærker #1 styrer transistoren VT1, så potentialet ved krydset mellem modstandene R2 og R4 forbliver nul. Hvis modstande R2 og R4 samtidig er ens, vil udgangsspændingen (positiv og negativ) forblive symmetrisk.
For uafhængig justering af balancen mellem to (positive og negative) udgangsspændinger kan du tilslutte yderligere trimningsmodstande til mikrokredsløbets specielle ben.
Den mindste spændingsfaldskarakteristik for ovennævnte lineære reguleringskredsløb er 3 volt. Dette er ret meget for batteri- eller batteridrevne enheder, og det er generelt ønskeligt at minimere spændingsfaldet. Til dette formål er udgangstransistoren lavet af typen pnp, således at kollektorstrømmen af differentialtrinnet er samtidigt med basisstrømmen af reguleringstransistoren VT1. Det mindste spændingsfald vil nu være i størrelsesordenen 1 volt.
Negative spændingsregulatorer fungerer på lignende måde med minimalt fald. For eksempel har regulatorerne i 1170ENxx-serien et spændingsfald på omkring 0,6 volt og overophedes ikke, når de fremstilles i TO-92-huset ved belastningsstrømme op til 100 mA. Selve stabilisatoren bruger ikke mere end 1,2 mA.
Sådanne stabilisatorer er klassificeret som lav droop. Endnu lavere spændingsfald opnås på MOSFET-baserede regulatorer (ca. 55 mV ved 1 mA chipstrømforbrug) såsom MAX8865 chippen.
Nogle stabilisatormodeller er udstyret med nedlukningsben for at reducere enhedernes strømforbrug i standby-tilstand — når et logisk niveau påføres denne pin, reduceres forbruget af stabilisatoren til næsten nul (linje LT176x).
Når vi taler om integrerede lineære stabilisatorer, bemærker de deres egenskaber såvel som dynamiske og nøjagtige parametre.
Nøjagtighedsparametrene er stabiliseringsfaktor, udgangsspændingsindstillingsnøjagtighed, udgangsimpedans og spændingstemperaturkoefficient. Hver af disse parametre er angivet i dokumentationen; de er relateret til nøjagtigheden af udgangsspændingen afhængig af indgangsspændingen og krystallens aktuelle temperatur.
Dynamiske parametre såsom rippelundertrykkelsesforhold og udgangsimpedans er indstillet til forskellige frekvenser af belastningsstrøm og indgangsspænding.
Ydeevnekarakteristika såsom indgangsspændingsområde, nominel udgangsspænding, maksimal belastningsstrøm, maksimal effekttab, maksimal input- og udgangsspændingsforskel ved maksimal belastningsstrøm, tomgangsstrøm, driftstemperaturområde, alle disse parametre påvirker valget af en eller den anden.stabilisator for et bestemt kredsløb.
Karakteristika for lineære spændingsregulatorer
Her er de typiske og mest populære kredsløb til at inkludere lineære stabilisatorer:
Hvis det er nødvendigt at øge udgangsspændingen af en lineær stabilisator med en fast udgangsspænding, tilføjes en zenerdiode i serie til den fælles terminal:
For at maksimere den tilladte udgangsstrøm er en kraftigere transistor forbundet parallelt med stabilisatoren, hvilket gør reguleringstransistoren inde i mikrokredsløbet til en del af en sammensat transistor:
Hvis det er nødvendigt at stabilisere strømmen, tændes spændingsstabilisatoren i henhold til følgende skema.
I dette tilfælde vil spændingsfaldet over modstanden være lig med stabiliseringsspændingen, hvilket vil føre til betydelige tab, hvis stabiliseringsspændingen er høj.I denne forbindelse vil det være mere hensigtsmæssigt at vælge en stabilisator til den lavest mulige udgangsspænding, såsom KR142EN12 til 1,2 volt.