Fasemålere og synkroskoper
 Fasemålere bruges til at bestemme fasevinklen, for eksempel af en vekselstrøm i forhold til den spænding, der forårsager den.
Fasemålere bruges til at bestemme fasevinklen, for eksempel af en vekselstrøm i forhold til den spænding, der forårsager den.
Den stationære del af fasemålerens målemekanisme omfatter tre spoler, hvoraf to 1 og 2 har form som rammer. De er forskudt i forhold til hinanden i en vinkel på 120 ° (fig. 1, a). Den cylindriske spole 3 er placeret inde i spolerne 1 og 2 koaksialt med den bevægelige del.
Den bevægelige del er dannet af en akse 4, til hvis ender er fastgjort kerner 5 i form af tynde plader, forskudt fra hinanden med 180° og kaldet kronblade. Aksen og kronbladene er lavet af blødt magnetisk materiale og danner en Z-formet struktur (fig. 1, b). Målemekanismen har ikke et modsat moment skabt af fjederen, derfor kan den pågældende enhed tilskrives forhold.
I fig. 2 viser skemaet for at tænde fasemåleren. Viklinger 1 og 2 er inkluderet i udskæringen af to ledninger af en trefaset linje, og vikling 3 er i serie med en modstand Rd, som har en betydelig aktiv modstand, er forbundet til netspændingen.De lineære strømme, der strømmer gennem disse viklinger, forskydes i forhold til hinanden i fase med 120 °, i forbindelse med hvilke viklinger 1 og 2 skaber en roterende magnetisk flux Ф12, som om de repræsenterede en belastningsstrømvektor. Frekvensen af dens rotation afhænger af frekvensen af strømmene I1 og I2... I en periode laver flowet F12 en komplet omdrejning.
Da modstanden Rqs modstand er stor sammenlignet med reaktansen af spolen 3, er strømmen Az3 i fase med linjespændingen. Spole 3, som et resultat af en sinusformet ændring i strøm, skaber en pulserende magnetisk flux F3, som er tæt på sinusformet. Symmetriaksen for denne strøm er fikseret i rummet og falder altid sammen med aksen for den bevægelige del af mekanismen. Fluxen F3 er lukket langs aksen 4 af den bevægelige del, kronbladene og det faste ydre cylindriske magnetiske kredsløb.
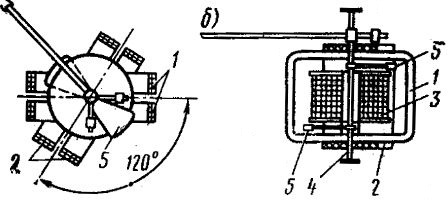
Ris. 1. Z-formet kerne elektromagnetisk system ratio målemekanisme
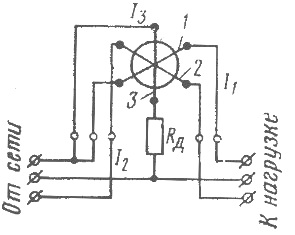
Ris. 2. Kredsløbsdiagram af fasemåleren for det elektromagnetiske system
Fluxerne F12 og F3, lukket i forskellige planer, magnetiserer den bevægelige del af målemekanismen. Da værdien af fluxen Ф12 er konstant, når magnetiseringen af aksen og kronbladene den højeste værdi i det øjeblik, hvor fluxen Ф3 passerer gennem den største værdi. På grund af påvirkningen af inertikræfter er den bevægelige del fastgjort ubevægelig i en position svarende til dens største magnetisering, dvs. positionen af den roterende flux Ф12 i det øjeblik, hvor fluxen Ф3 når sin maksimale værdi.
Det skal huskes, at positionen af den roterende flux i forhold til den stationære del af enheden i tidspunktet for passage af fluxen Ф3 og strømmen Аз3 gennem værdien af amplituden afhænger af vinklen φ-ændringen mellem belastningsstrømmen og spændingen. I betragtning af dette vil den position, som den bevægelige del (og følgelig indretningens viser) indtager i forhold til skalaen, dvs. vinklen α karakteriserer faseforskydningen mellem belastningsstrømmen og spændingen.
Et faseometer, der arbejder efter dette princip, måler faseskift med kapacitive og induktive belastninger. Enhedens skala kan gradueres i vinkelværdier φ eller cosφ... I det første tilfælde er det ensartet, i det andet er det ujævnt.
Phasometer Ts302
Synkronoskoper
Den pågældende målemekanisme bruges også i synkroskopet, en enhed, der bruges ved tilslutning af synkrone generatorer til paralleldrift.
Diagrammet for at tænde for synkroskopet er vist i fig. 3.
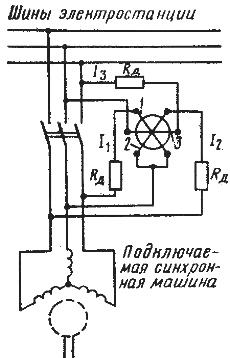
Ris. 3. Kredsløbsdiagram over det elektromagnetiske systems synkronoskop
Konstruktionen af spolerne 1, 2 og 3 af målemekanismen svarer til konstruktionen af de tilsvarende spoler af fasemåleren, men de er lavet af tynd kobbertråd med et stort antal vindinger, som et resultat af hvilke spolerne har en betydelig modstand. Spole 3 er forbundet til netværkets linjespænding, spoler 1 og 2 - til linjespændingerne på den tilsluttede synkronmaskine. Modstandene er forbundet i serie med spolerne R og så videre.
Som nævnt er den bevægelige del af målemekanismen monteret i det resulterende magnetiske felt af de tre spoler, således at aksen af den bevægelige dels lober falder sammen med retningen af det roterende felt Ф12, i hvilket det vil blive fanget af amplitudeværdien af det pulserende felt F3.
Denne position af lober af den bevægelige del ved samme frekvens af strømmen i spolernes viklinger afhænger af faseforskydningen mellem strømmene I1 og Az2 i viklingerne af spolerne 1, 2 og strømmen Az3 i viklingen af spolen 3. Strømme I1 og Az2 falder praktisk talt sammen i fase med linjespændingen af den synkrone generator og strømmen Az3 — med netspændingen (fra modstanden af modstanden Rq er stor).
Som en konsekvens ° С Således vil synkroskopets indikatoranordning, når frekvenserne af netstrømmen og den tilsluttede generator er ens, direkte indikere faseforskydningen mellem linjespændingerne i disse trefasede systemer.
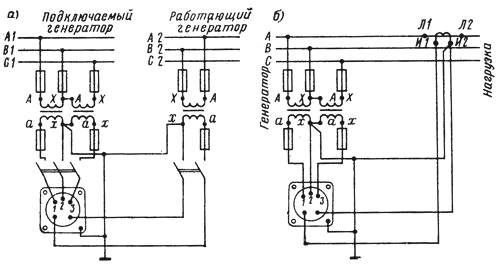
Ris. 4. Tilslutningsdiagrammer: a — synkroskop, b — faseometer for det elektromagnetiske system

Ris. 5. Synkronoskop type E1605
Ved synkronisering er frekvensen af netstrømmen og strømmen af den tilsluttede generator ikke den samme. Dette resulterer i en kontinuerlig ændring i fasevinklen mellem netspændingen og f.eks. etc. v. generator og derfor til en ændring i kronbladenes position i forhold til de stationære spoler. Da den bevægelige del af synkroskopet kan drejes til enhver vinkel, roterer markøren.
Omdrejningsretningen afhænger af tegnet på frekvensforskellen mellem lysnettet og den tilsluttede generator. Jo mindre denne forskel er, jo langsommere rotation af synkroskopmarkøren.
Enhedens skala har et fortegn svarende til spændingsvektorernes modfaseposition og f.eks. etc.v. synkroniserede objekter. Synkronmaskinen skal tilsluttes stationsbusserne under gasmaskepositionen af vektorerne af f.eks. etc. s. og busspændinger.
I fig. 4 viser et ledningsdiagram for en elektromagnetisk fasemåler og et ledningsdiagram for et elektromagnetisk synkronskop.