Optiske nærhedskontakter
Optiske nærhedsafbrydere (sensorer) er meget udbredt i dag i mange industrier, hvor udstyr bruges til at positionere, tælle og blot detektere forskellige objekter. Brugen af kodning i sensorkredsløb gør det muligt at undgå den ydre påvirkning af lyskilder på dem og beskytter dermed mod falske alarmer. Følere i termiske huse er designet til drift ved lave temperaturer.
Disse enheder er elektroniske kredsløb, der reagerer på en ændring i lysstrømmen, der falder på modtageren, på grund af hvilken tilstedeværelsen eller fraværet af et objekt i et bestemt område af rummet registreres. Kodning af lyset udsendt af kilden (rumlig udvælgelse og modulering) forbedrer effektiviteten og, som nævnt ovenfor, ophæver virkningerne af interferens.
Strukturelt omfatter sensorsystemet to hovedfunktionsblokke - strålingskilden og dens modtager. Disse kan være to separate huse, eller et hus for begge blokke, afhængigt af princippet om drift af en bestemt sensor (switch).
En kilde eller emitter består af følgende dele: en generator, en emitter, en indikator, et optisk system og et hus, inde i hvilket der er et kredsløb beskyttet af en samling, og udenfor - alt nødvendigt til fastgørelse. Generatorens opgave er at generere en sekvens af signalimpulser til senderen.
Selve emitteren er en LED. LED'ens emissionsmønster dannes af det optiske system. Indikatoren viser tilstedeværelsen eller fraværet af strøm til sensoren. Huset beskytter mod ydre mekaniske påvirkninger og tjener til bekvem installation på det sted, hvor sensoren anvendes.
Modtageren har til gengæld også et optisk system, der danner modtagerens retningsmønster og sørger for valg. Fotodetektoren der betjener fototransistorsom registrerer strålingen og omdanner den til et elektrisk signal; et forstærkerkredsløb med et tærskelelement for at give en pålidelig hældning med hysterese; en elektronisk kontakt til at skifte belastning og en regulator til at justere modtagerens følsomhed, så genstande optages tydeligt mod den omgivende baggrund.
Der er to indikatorer her: den første viser status for output, den anden viser kvaliteten af det modtagne signal og giver dig mulighed for at bestemme den funktionelle reserve for det overvågede objekt.
I dette tilfælde karakteriserer den funktionelle reserve forholdet mellem den lysstrøm, modtageren modtager fra emitteren, til dens minimumsværdi, som allerede forårsager operationen. Funktionsreserven kompenserer for signaldæmpning på grund af forurening af optikken eller fra forstyrrende aerosolpartikler i omgivelserne.
For eksempel:
- indikatoren lyser rødt, hvilket betyder, at det sporede objekt er til stede i triggerzonen;
- gult lys — intensiteten af den modtagne lysflux reduceres;
- grøn - intensiteten af den modtagne lysflux er minimal;
- slukket - objektet er ikke i sensorens arbejdsområde.
Ifølge driftsprincippet er optiske sensorer af tre typer:
Barriere (type T)
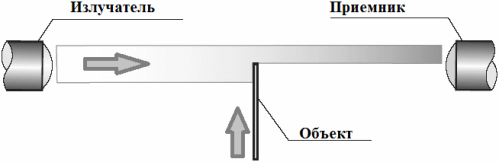
Optiske kontakter af barrieretypen fungerer på en direkte stråle og indeholder to separate dele, en sender og en modtager, som skal placeres koaksialt over for hinanden, således at strålingsfluxen, der udsendes af emitteren (senderen), er rettet og præcist rammer modtageren.
Når strålen afbrydes af et objekt, udløses kontakten. Sensorer af denne type kan arbejde i en afstand på snesevis af meter mellem senderen og modtageren, desuden har de god støjisolering, de er ikke bange for støv, ikke en dråbe væske osv.
Men der er også ulemper:
- nogle gange er det nødvendigt at lægge strømledninger separat til hver af de to dele på lange afstande;
- stærkt reflekterende genstande kan forårsage falske alarmer;
- Gennemsigtige genstande svækker muligvis ikke strålen nok, dette bør tages i betragtning.
Følsomhedsregulatoren bruges til acceptabel eliminering af disse mangler. Og selvfølgelig bør minimumsstørrelsen af det detekterede objekt ikke være mindre end strålens diameter.
Diffus (type D)
Diffuse sensorer bruger en stråle, der reflekteres fra et objekt, en spejlende refleksion. Modtager og sender er i ét hus. Emitteren dirigerer strømmen til objektet, strålen reflekteres fra dens overflade i forskellige retninger, afhængigt af objektets optiske egenskaber. En del af flowet går tilbage, hvor det opfanges af modtageren, og kontakten aktiveres.
Her er det vigtigt at overveje, at falske alarmer kan være forårsaget af reflekterende genstande placeret bag installationens arbejdsområde, bag det kontrollerede objekt. For at eliminere sådan interferens anvendes kontakter med en baggrundsdæmpningsfunktion.
For at standardisere afstanden, hvormed den diffuse sensor vil blive udløst, skal du tage et hvidt ark papir (10 x 10 cm for afstande op til 40 cm eller 20 x 20 cm for detekteringsafstande over 40 cm) eller en varmvalset stålplade og test det under lignende forhold ... Generelt i forskellige brancher - på forskellige måder.
For mere nøjagtig normalisering genberegnes afstanden i henhold til en speciel tabel, der afspejler de reflekterende egenskaber af forskellige materialer, og derfor tilføjes en korrektionsfaktor. For eksempel har en sensor en værdi på 100 mm, men du vil gerne overvåge f.eks. genstande i rustfrit stål.
Korrektionsfaktoren bliver 7,5, hvilket betyder, at den sikre aktiveringsafstand bliver 7,5 gange større, nemlig 750 mm. Den mindste objektstørrelse bestemmes af dens reflekterende egenskaber, kontrast og funktionelle reserve.
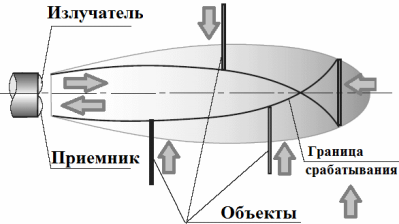
Refleks (type R)
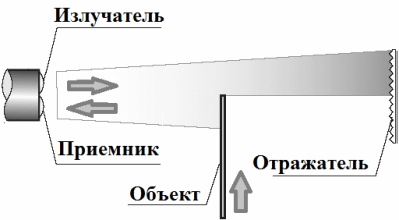
Her bruges det lys, der reflekteres af reflektoren. En modtager med en sender i det ene hus, strålen der falder på reflektoren reflekteres, rammer modtageren og udløses. Når objektet forlader arbejdsområdet, opstår der en anden trigger. Sensorer af denne type kan arbejde i en afstand på op til 10 meter og bruges til at fikse gennemskinnelige genstande.