Vendbar enfaset motor
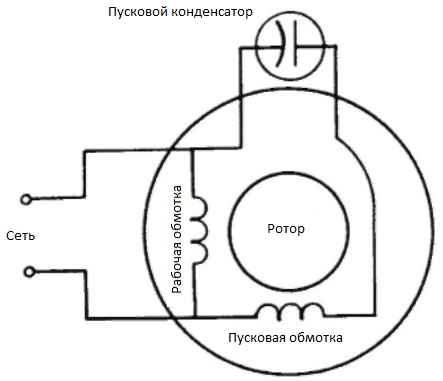
En induktionsmotor kaldes en enfaset motor, på hvis stator der kun er en arbejdsvikling, direkte forsynet af en fase af netværket. Der er også en hjælpe (start) vikling i en enfaset motor, som kun bruges på tidspunktet for start af motoren for at give rotoren en indledende impuls, faktisk tændes startviklingen for at tage rotoren ud af ligevægtspositionen, ellers vil den ikke bevæge sig uden assistance, og han bliver nødt til at blive skubbet på en anden måde.
Som med enhver motor har en enfaset motor også en rotor, der roterer, og en stator, der er stationær, men kun tjener til at skabe et tidsvarierende magnetfelt. Arbejds- og startviklingerne er placeret på statoren vinkelret på hinanden, og arbejdsviklingen optager dobbelt så mange spalter som startviklingen.
Vi kan sige, at en sådan motor på starttidspunktet fungerer som en tofaset og derefter skifter til en enfaset driftstilstand. Rotoren af en enfaset asynkronmotor er den mest almindelige konstruktion - egernbur (egernbur) eller cylindrisk (hul).
Hvad nu hvis der slet ikke var nogen startervikling på statoren, eller den var der, men ikke brugt. I dette tilfælde, når motoren er forbundet til netværket, vil et pulserende magnetfelt vises i arbejdsspolen, og rotoren vil falde under betingelserne for en skiftende magnetisk flux, der trænger ind i den.
Men hvis rotoren til at begynde med er stationær, og vi pludselig kun anvender en vekselstrøm til arbejdsspolen, vil rotoren ikke bevæge sig fra sin plads, fordi det samlede drejningsmoment (med uret og mod uret) vil være nul, på trods af den emf induceret i rotoren, og der er ingen grund til rotation, fordi Amperes emergente kræfter ophæver hinanden.
Det er en helt anden sag, hvis rotoren skubbes, vil den fortsætte med at rotere i samme retning som det indledende skub, for nu vil der ikke kun ifølge loven om elektromagnetisk induktion blive induceret en EMF i rotoren og, følgelig vil der opstå strømme, som ifølge loven om ampere vil blive frastødt af magnetfeltet, men også (da rotoren allerede har rotation) vil det resulterende drejningsmoment i skubretningen være større end drejningsmomentet mod skubretningen . Som et resultat får vi fortsat rotation af rotoren.
For at startviklingen kan skubbe rotoren i startøjeblikket, skal den ikke kun forskydes i rummet i forhold til arbejdsviklingen, men strømmen i den skal også forskydes i fase i forhold til arbejdsviklingsstrømmen, så kombineret virkning af disse to statorviklinger vil ikke kun svare til et pulserende magnetfelt, men allerede til et roterende magnetfelt. Og det er præcis, hvad der er nødvendigt for at accelerere rotoren under starten af en enfaset motor.
For at faseforskyde strømmen i startviklingen bruges normalt en kondensator med den nødvendige kapacitans, forbundet i serie med startviklingen og skaber et faseskift på 90 grader. Dette er standardløsningen til splitfasemotorer.
Så snart motoren er tilsluttet netværket, trykker operatøren på omskifterknappen, som leverer energi til spolestartkredsløbet, og så snart hastigheden når den påkrævede værdi svarende til ratingen ved den givne frekvens af netværket, knappen slippes.
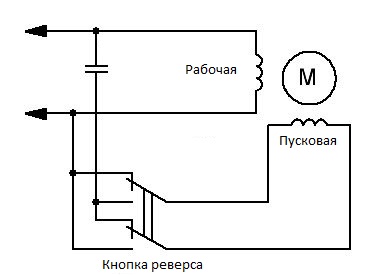
For at opnå en reversering af en enfaset kondensator-startmotor er det tilstrækkeligt at tilvejebringe en tilstand, hvor startimpulsen vil blive leveret i en anden retning end den oprindeligt leverede. Dette opnås ved at ændre den relative rækkefølge af faserotation i arbejds- og startviklingerne.
For at sikre disse forhold er det nødvendigt at skifte arbejds- eller startspolen, det vil sige at ændre «polariteten» af forbindelsen af dens terminaler til netværket eller til netværket og til kondensatoren. Dette er nemt at gøre, fordi der på en enfaset motor er en klemrække, hvortil hver af enderne af både start- og køreviklinger føres ud. Løbespolen har en lavere aktiv modstand end startspolen, så den er nem at finde med et multimeter. Den bedste løsning er at sætte startspolens ledninger på en to-polet øjeblikkelig kontakt.