Sensortilslutningsdiagrammer
Tilslutningsdiagrammer af sensorer, mere almindeligt kaldet målekredsløb, er designet til at konvertere sensorens outputværdi, og i de fleste tilfælde er dette en ændring i deres indre modstand, til en mere bekvem værdi for dens efterfølgende brug. Som regel er der tale om en elektrisk strøm eller spændingsændring, der enten kan bestemmes direkte ved hjælp af en elektrisk måleanordning eller efter forstærkning føres til en passende aktuator eller registreringsanordning.

Til disse formål er følgende skifteordninger meget brugt:
-
konsekvent,
-
fortov,
-
differential,
-
kompenserende.
Sekventielt kredsløbsdiagram består af en jævnstrøms- eller vekselstrømskilde, selve Rx-sensoren, en måleanordning eller en direkte drivmekanisme og normalt en ekstra modstand Rd, der begrænser strømmen i dette kredsløb (fig. 1). Et sådant koblingskredsløb er oftest udbredt kun med kontaktsensorer, for hvilke Rx = 0 eller Rx = ?.
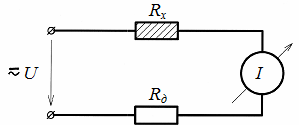
Ris. 1. Seriel kredsløb til tilslutning af sensorer
For når man arbejder med andre sensorer i måleapparatets kredsløb, strømmer der altid en elektrisk strøm bestemt af udtrykket I = U /(Rx + Rd), og en lille ændring i sensorens indre modstand fører til en meget lille ændring i denne strøm. Som et resultat anvendes minimumssektionen af måleanordningens skala, og målingens nøjagtighed reduceres praktisk talt til nul. Derfor anvendes der til de fleste andre sensorer specielle målekredsløb, som øger målingens følsomhed og nøjagtighed markant.
Mest brugt bro kredsløb switching, hvor en og nogle gange flere sensorer er forbundet på en bestemt måde sammen med yderligere modstande i en firkant (den såkaldte Winston Bridge), som har to diagonaler (fig. 2). En af dem, kaldet a-b power diagonal, er designet til at forbinde en DC- eller AC-kilde, og den anden, c-d-målediagonal, inkluderer en måleenhed.
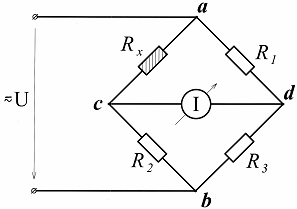
Ris. 2. Brokredsløb til tilslutning af sensorer
Hvis produkterne af modstandsværdierne på de modsatte sider af firkanten (broarme) er lig Rx x R3 = R1NS R2, vil potentialerne for punkterne c og d være ens, og der vil ikke være nogen strøm i målediagonalen. Denne tilstand af brokredsløbet kaldes almindeligvis bro balance, dvs. brokredsløbet er afbalanceret.
Hvis modstanden af Rx-sensoren ændres på grund af ekstern påvirkning, vil balancen blive forstyrret, og en strøm, der er proportional med ændringen i denne modstand, vil strømme gennem måleapparatet. I dette tilfælde indikerer retningen af denne strøm, hvordan sensorens modstand har ændret sig (øget eller faldet).Her, med et passende valg af måleapparatets følsomhed, det hele arbejdsskala.
Det pågældende brokredsløb kaldes ubalanceret, da måleprocessen foregår kl uligevægt bro, dvs. uligevægt. Et ubalanceret brokredsløb anvendes oftest i de tilfælde, hvor modstanden af sensoren under påvirkning af eksterne kræfter kan ændre sig meget hurtigt pr. ændringer.
Det anses for at være mere følsomt balanceret brokredsløb, hvor en speciel målereostat R (fig. 3), udstyret med en skala og i måleteknikken kaldes en rheochord, yderligere er forbundet med to tilstødende arme.
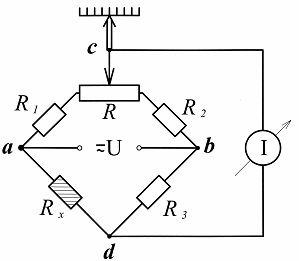
Ris. 3. Balanceret brokredsløb
Når man arbejder med et sådant kredsløb, skal brokredsløbet ved hver ændring i sensorens modstand rebalanceres med den medfølgende skyder, dvs. mens der ikke er strøm i målediagonalen. I dette tilfælde bestemmes værdien af den målte parameter (ændring i modstandsværdien af sensoren) af en speciel skala, der er udstyret med denne registrering og kalibreret i enheder af værdien målt af sensoren.
Den højere nøjagtighed af den balancerede bro forklares af, at det er lettere at bestemme manglen på strøm i måleanordningen end at måle dens værdi direkte, og afbalancering af broen i sådanne tilfælde udføres som regel ved hjælp af en speciel elektrisk motor styret af brokredsløbets ubalancesignal.
Brokredsløb til at skifte sensorer anses for universelle, da de kan drives af både jævn- og vekselstrøm, og vigtigst af alt kan flere sensorer tilsluttes disse kredsløb på samme tid, hvilket bidrager til at øge ikke kun følsomheden, men også målenøjagtighed.
Differentialkredsløb inklusion af sensorer er bygget ved hjælp af en speciel transformer drevet af et vekselstrømsnetværk, hvis sekundære vikling er opdelt i to identiske dele. I dette kredsløb (fig. 4) dannes således to tilstødende kredsløb, som hver har sin egen strømløkke I1 og I2. Og værdien af strømmen i måleanordningen bestemmes af forskellen mellem disse strømme, og hvis modstandene af sensoren Rx og den ekstra modstand Rd er ens, vil der ikke være nogen strøm i måleanordningen.
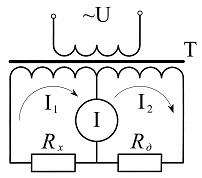
Ris. 4. Differentialsensorkoblingskredsløb
Når sensorens modstand ændres, vil en strøm, der er proportional med denne ændring, strømme gennem måleapparatet, og fasen af denne strøm vil afhænge af arten af ændringen i denne modstand (stigning eller fald). Kun vekselstrøm bruges til at drive differentialkredsløbet, og derfor er det mere hensigtsmæssigt at bruge reaktive sensorer (induktive eller kapacitive) som sensorer.
Det er især praktisk at bruge et sådant skiftekredsløb, når du arbejder med differentielle induktive eller kapacitive sensorer. Ved brug af sådanne sensorer registreres ikke kun størrelsen af bevægelsen, for eksempel af den ferromagnetiske kerne (fig. 5), men også retningen af denne bevægelse (dens tegn), som et resultat af, at fasen af den alternerende strøm, der passerer gennem måleapparatet, ændres.Dette øger målingens følsomhed yderligere.
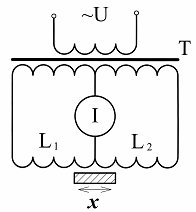
Ris. 5. Tilslutningsdiagram for en induktiv differentialføler
Det skal bemærkes, at for at øge nøjagtigheden af målingen, anvendes i nogle tilfælde andre typer af lignende målekredsløb, f.eks. balancerede differentialkredsløb… Sådanne kredsløb inkluderer enten en gentaget akkord eller en speciel målingsautotransformer med en speciel skala, og måleprocessen med sådanne kredsløb ligner målinger med et balanceret brokredsløb.
Kompensationsordning inklusion af sensorer anses for at være den mest nøjagtige af alle dem, der er diskuteret ovenfor. Dens drift er baseret på udgangsspændingskompensation eller EMF. en sensor svarende til den med hensyn til spændingsfaldet i målereostaten (rheochord). Kun en DC-kilde bruges til at drive kompensationskredsløbet, og den bruges hovedsageligt med DC-generatorsensorer.
Lad os se på driften af dette kredsløb ved at bruge eksemplet med at bruge et termoelement som en sensor (fig. 6).
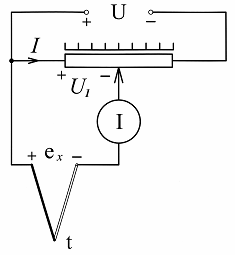
Ris. 6. Kompensationskredsløb for at tænde for den termoelektriske føler
Under påvirkning af den påførte spænding U løber en strøm gennem målereostaten, hvilket forårsager et fald i spændingen U1 i sektionen af reostaten fra dens venstre udgang til motoren. I tilfælde af lighed mellem denne spænding og EMF termoelementer - vil der ikke være nogen strøm gennem glucometeret.
Hvis værdien af emk-sensoren ændres, er det nødvendigt at opnå fraværet af denne strøm igen ved at bruge skyderen på skyderen. Her, som i ligevægtsbrokredsløbet, værdien af den målte parameter, i vores tilfælde temperaturen (emf termoelement) bestemmes af skalaen af glidetråden, og bevægelsen af dens motor udføres oftest også ved hjælp af en speciel elektrisk motor.
Den høje nøjagtighed af kompensationskredsløbet skyldes, at den elektriske energi, der genereres af sensoren under målingen, ikke forbruges, da strømmen i kredsløbet af dens inklusion er nul. Dette kredsløb kan også bruges med parametriske sensorer, men så er der behov for en ekstra DC-kilde, som bruges i den parametriske sensors strømforsyningskredsløb.