Hvad er en lineær differentialtransformator
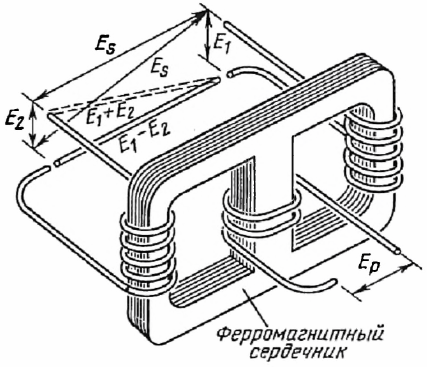
En vekselstrøm, der flyder i en primær spole, kan bruges til at inducere en vekselspænding i to sekundære spoler. Hvis de to sekundære viklinger er identiske i deres karakteristika, og de to veje af magnetfeltlinjerne, der passerer gennem disse spoler, også er identiske, så vil de to genererede sekundære spændinger være ens. En enhed med denne struktur kaldes en differentialtransformator.

En differentialtransformator kan have en luftkerne eller en magnetisk kerne.
To sekundære viklinger kan forbindes enten i fase eller modfase, i det første tilfælde lægges deres spændinger til hinanden, og i det andet tilfælde trækkes den ene fra den anden.
En primærvikling bruges til at drive to symmetriske sekundærviklinger, hvoraf sidstnævnte kan forbindes, så de sekundære spændinger lægges til eller trækkes fra hinanden.
Hvis to spoler er forbundet i henhold til et subtraktionsskema, vil den samlede sekundære spænding være nul ved de samme værdier af deres spændinger.Hvis de magnetiske kredsløbskarakteristika for en af disse spoler bevidst ændres sammenlignet med den anden spoles magnetiske kredsløbskarakteristika, vil de to sekundære spændinger være forskellige, og deres forskel vil ikke være nul.
Under disse forhold indikerer fasen af den samlede sekundære spænding, hvilken vej af magnetfeltlinjerne der har den største modstand, mens amplituden af denne spænding afspejler værdien af reluktansforskellen.
Hvis den samme handling bruges til at øge den magnetiske modstand af den ene vej og for at mindske den magnetiske modstand af den anden vej, så når udgangsspændingen, der afspejler denne handling, sin maksimale værdi, og overførselsfunktionen vil have den størst mulige linearitet.
Da ingen to sekundære viklinger og ikke to veje af magnetfeltlinjer kan laves nøjagtigt ens, har en differentialtransformator altid en bestemt udgangsspænding, selv med nul nyttigt signal ved indgangen.
Derudover er karakteristika for magnetiske kredsløb ikke-lineære. Som et resultat af denne ikke-linearitet fremkommer selv harmoniske komponenter af grundfrekvensen af den påførte primære excitationsspænding, som ikke kan kompenseres fuldt ud i noget arrangement af sekundærviklingerne.
Reluktansen af et ferromagnetisk kredsløb med luftgab er en funktion af spaltebredden med stærk ikke-linearitet. Som følge heraf er induktansen af en spole viklet omkring et sådant kredsløb også en ikke-lineær funktion af spaltebredden.
På samme tid, hvis der er to mere eller mindre identiske baner af magnetfeltlinjerne, hver med en luftspalte, og hvis bredden af den ene spalte øges, når bredden af den anden aftager, så er forskellen i magnetisk modstand af disse stier kan variere tilstrækkeligt lineært.
De grundlæggende principper for differentialtransformatoren er udmøntet i praksis i en række specifikke designkonfigurationer til mange forskellige formål.
Linear Variable Differential Transformer (LVDT) er en passiv transducer (sensor), der arbejder efter princippet om gensidig induktion og kan bruges til at måle forskydning, belastning, tryk og vægt.
Oftest kan de ved hjælp af NS bruges til at måle forskydning i intervallet fra flere millimeter til centimeter, der direkte konverterer I'm forskydning til et elektrisk signal.
Induktansen af spolen nær eller inde i hvilken den ferromagnetiske stang er placeret, er en funktion af koordinaten for denne stangs position i forhold til spolen med stærk ikke-linearitet.
Hvis en sådan stang er et ferromagnetisk kredsløb af en differentialtransformator, kan den sekundære differentialspænding tjene som en indikator for stangens forskydning, afhængigt lineært nok af denne forskydning.
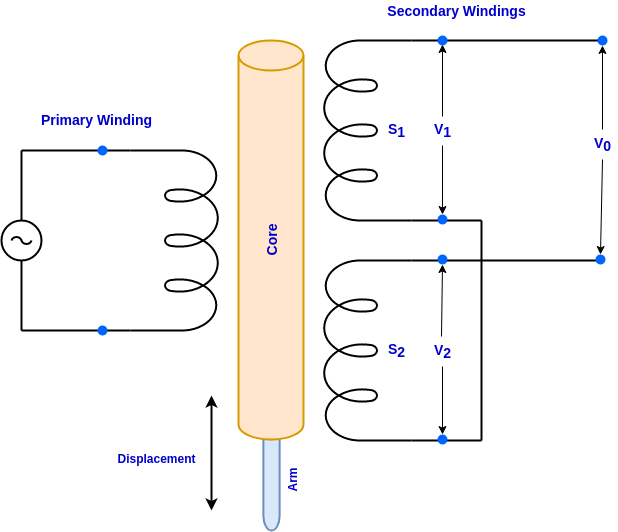
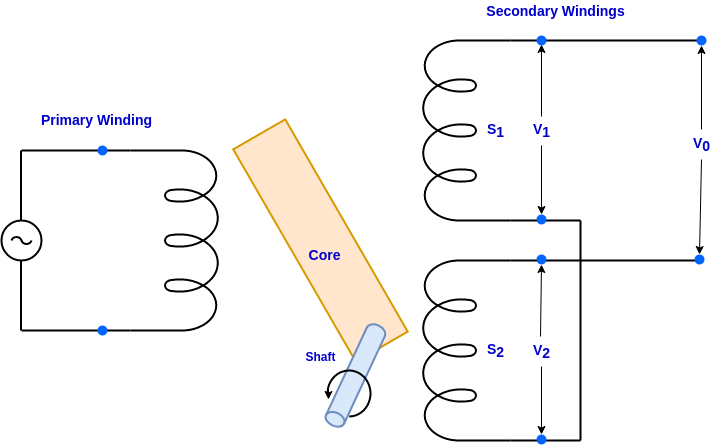
Den primære vikling er forbundet til en AC-kilde. De to sekundære viklinger S1 og S2 har lige mange vindinger og er monteret i serie over for hinanden.
EMF induceret i disse viklinger er således 180° ude af fase med hinanden, og dermed udligner den samlede effekt.

Placeringen af den symmetriske ferromagnetiske kerne, der er tilvejebragt i designet af differentialtransformatoren, kan bestemmes ud fra fasen og amplituden af den sekundære spænding.
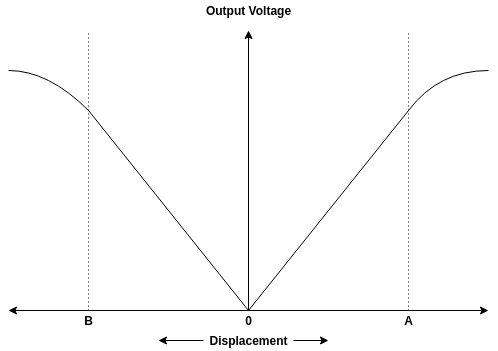
Den absolutte forskel mellem de to sekundære spændinger angiver den absolutte værdi af stangens forskydning i forhold til midter- eller nulpositionen, og fasen af denne forskellige spænding angiver retningen af forskydningen.
B/I-kurven for en lineær variabel differentialtransformator er vist på figuren.
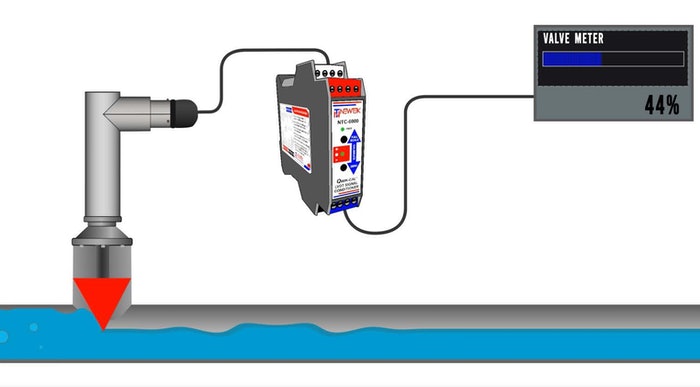
Et eksempel på brug af en lineær differentialtransformator til at give nøjagtig positionsfeedback til ventilovervågning og kontrol i kemiske anlæg, kraftværker og landbrugsudstyr:
Nedsænkelige forskydningssensorer LVDT D5W:
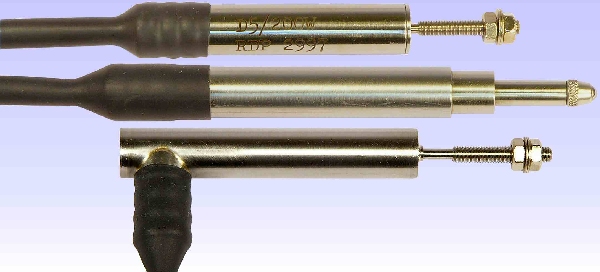
Disse transducere er designet til at måle forskydning og position. De giver nøjagtig måling af positionen af ankeret (glidedelen) i forhold til forskydningssensorhuset.
Nedsænkelige forskydningstransducere er designet til at tage målinger, mens de er nedsænket i passende væsker. Ikke-magnetiske væsker kan oversvømme ankerrøret uden at påvirke konverterens funktion. Disse omformere fås i ukontrollerede eller fjederreturversioner.
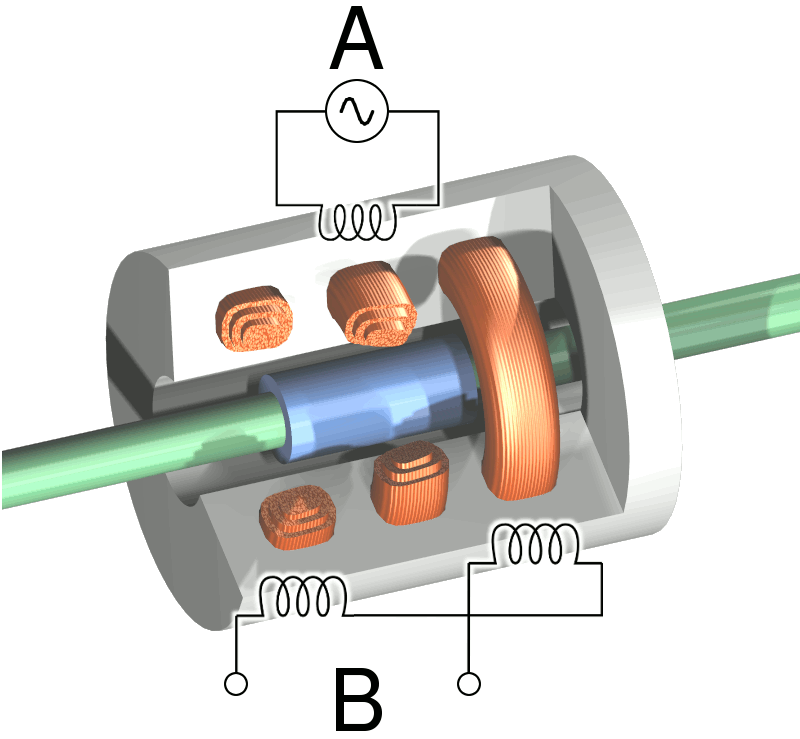
Ved automatisering af forskellige teknologiske processer bruges ofte bilaterale omformere med en differentialtransformator med en ferromagnetisk kerne, som er indsat i enderne med lige store afstande i de to sekundære spoler.
Når stangen bevæger sig aksialt, bevæger den sig dybere ind i en af disse spoler og strækker sig fra den anden.Den absolutte forskel mellem de to sekundære spændinger angiver den absolutte værdi af stangens forskydning i forhold til midter- eller nulpositionen, og fasen af denne forskellige spænding angiver retningen af forskydningen.
Roterende AC Differential Transformer:
En roterende variabel differentialtransformator er en passiv transformer baseret på princippet om gensidig induktion. Det bruges til at måle vinkelforskydning.
Dens design svarer til en lineær variabel differentialtransformator bortset fra kernekonstruktionen.
Den primære vikling er forbundet til en AC-kilde. De to sekundære viklinger S1 og S2 har lige mange vindinger og er monteret i serie over for hinanden.
Fordele ved lineær differentialtransformator:
-
Der er ingen fysisk kontakt mellem kernen og spolerne;
- Høj pålidelighed;
-
Hurtig reaktion;
-
Lang levetid.
Det er den mest udbredte induktive sensor på grund af dens høje nøjagtighed.