Mekaniske egenskaber ved elektriske motorer og produktionsmekanismer
 Ved design af et elektrisk drev skal elmotoren vælges, så dens mekaniske egenskaber matcher produktionsmekanismens mekaniske egenskaber. De mekaniske karakteristika angiver forholdet mellem variablerne i steady state.
Ved design af et elektrisk drev skal elmotoren vælges, så dens mekaniske egenskaber matcher produktionsmekanismens mekaniske egenskaber. De mekaniske karakteristika angiver forholdet mellem variablerne i steady state.
En mekanisk karakteristik af mekanismen kaldes forholdet mellem vinkelhastigheden og mekanismens modstandsmoment, reduceret til motorakslen) ω = f (Mc).
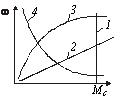
Ris. 1. Mekaniske egenskaber ved mekanismer
Blandt alle sorten er der flere karakteristiske typer af mekaniske egenskaber ved mekanismerne:
1. Karakteristisk med et modstandsmoment uafhængigt af hastighed (lige linie 1 i fig. 1). Den hastighedsuafhængige mekaniske karakteristik er tegnet som en ret linje parallel med rotationsaksen, i dette tilfælde lodret. En sådan egenskab besidder for eksempel kraner, spil, stempelpumper med konstant leveringshøjde osv.
2.En karakteristik med et modstandsmoment lineært afhængigt af hastigheden (række 2 i fig. 1). Denne afhængighed er f.eks. iboende i drevet af en uafhængigt exciteret jævnstrømsgenerator, der arbejder med en konstant belastning.
3. Karakteristisk med en ikke-lineær forøgelse af drejningsmomentet (kurve 3 i fig. 1). Typiske eksempler er drift af ventilatorer, centrifugalpumper, propeller. For disse mekanismer afhænger momentet Mc af kvadratet af vinkelhastigheden ω... Dette er den såkaldte parabolsk (ventilator) mekanisk karakteristik.
4. Karakteristisk med ikke-lineært faldende modstandsmoment (kurve 4 i fig. 1). Her er trækmomentet omvendt proportional med omdrejningshastigheden. I dette tilfælde forbliver effekten konstant gennem hele mekanismens driftshastighedsområde. For eksempel i mekanismerne for hovedbevægelsen af nogle metalskærende maskiner (drejning, fræsning, boring), ændres øjeblikket Mc omvendt proportionalt med ω, og den effekt, der forbruges af mekanismen, forbliver konstant.
Den elektriske motors mekaniske karakteristika kaldes afhængigheden af dens vinkelhastighed af drejningsmomentet ωd = f (M). Her skal man huske på, at momentet M på motorakslen, uanset omdrejningsretningen, har et positivt fortegn - bevægelsesmomentet. Samtidig har modstandsmomentet Mc et negativt fortegn.
Som eksempler viser fig. 2 viser de mekaniske egenskaber: 1 — synkronmotor; 2 — DC-motor med uafhængig excitation; 3 — DC-motor med seriemagnetisering.
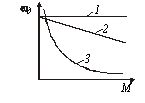 Ris. 2. Mekaniske egenskaber ved elektriske motorer
Ris. 2. Mekaniske egenskaber ved elektriske motorer
For at evaluere egenskaberne af de mekaniske egenskaber af et elektrisk drev, bruges begrebet karakteristisk stivhed.Stivheden af den mekaniske egenskab bestemmes af udtrykket
β = dM/dω
hvor dM — ændring i motorens drejningsmoment; dωd — den tilsvarende ændring i vinkelhastighed.
For lineære karakteristika forbliver værdien β konstant, for ikke-lineær afhænger den af driftspunktet.
Ved at bruge dette koncept vil funktionerne vist i fig. 2, kan kvalitativt vurderes som følger: 1 — absolut rigid (β = ∞); 2 — fast; 3 - blød.
En absolut vanskelig karakteristik - motorens rotationshastighed forbliver uændret, når motorbelastningen ændres fra nul til nominel. Synkronmotorer har denne egenskab.
Stiv karakteristik — rotationshastigheden ændrer sig lidt, når belastningen ændres fra nul til nominel. Denne karakteristik besidder en parallel-exciteret DC-motor samt af en induktionsmotor i området for den lineære del af karakteristikken.
En stiv karakteristik anses for at være en, hvor hastighedsændringen ikke overstiger ca. 10 % af den nominelle hastighed, når belastningen ændres fra nul til nominel.
Blød karakteristik — motorhastigheden ændres betydeligt med relativt små ændringer i belastningen. Denne karakteristik besidder en jævnstrømsmotor med serie-, blandet eller parallel excitation, men med yderligere modstand i ankerkredsløbet, samt asynkron med modstand i rotorkredsløbet.
Til de fleste produktionsmekanismer anvendes asynkrone egern-burmotorer, som har stive mekaniske egenskaber.
Alle mekaniske egenskaber ved elektriske motorer er opdelt i naturlige og kunstige.
Naturlige mekaniske egenskaber refererer til motorens driftsbetingelser med de nominelle værdier af parametrene.
For eksempel, for en parallel-exciteret motor, kan den naturlige karakteristik plottes for det tilfælde, hvor ankerspændingen og excitationsstrømmen har nominelle værdier, og der ikke er yderligere modstand i ankerkredsløbet.
Den naturlige karakteristik af en induktionsmotor svarer til den nominelle spænding og nominelle frekvens af den vekselstrøm, der leveres til motorstatoren, forudsat at der ikke er yderligere modstand i rotorkredsløbet.
For hver motor kan der således kun bygges en naturlig egenskab og et ubegrænset antal kunstige. For eksempel har hver ny værdi af ankermodstand for en DC-motor eller i rotorkredsløbet af en induktionsmotor sine egne mekaniske egenskaber.
