Grundlæggende parametre og karakteristika for elektromagnetiske relæer
 Et elektrisk apparat, der anvender relæstyringsloven, kaldes et relæ... I et relæ, når kontrol (input) parameteren jævnt ændres til en bestemt indstillet værdi, ændres den kontrollerede (output) parameter brat. Desuden skal mindst én af disse parametre være elektrisk.
Et elektrisk apparat, der anvender relæstyringsloven, kaldes et relæ... I et relæ, når kontrol (input) parameteren jævnt ændres til en bestemt indstillet værdi, ændres den kontrollerede (output) parameter brat. Desuden skal mindst én af disse parametre være elektrisk.
Virkning af funktionelle organer elektromagnetisk relæ kan spores efter diagrammet i fig. 1. Det modtagende legeme A omdanner indgangsværdien (spændingen) Uin tilført til spolen 2 af det magnetiske kredsløb 1 til en mellemværdi, dvs. i ankerets mekaniske kraft 3. Ankerets FЯ mekaniske kraft virker på det udøvende organs B's kontaktsystem. Mellemværdien — kraften af ankeret FЯ, er proportional med inputværdien Uin, sammenlignes med en givet værdi af kraften Fpr udviklet af fjederen 9 af mellemlegemet B. Når Uin <Uav, Fya
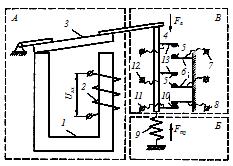 Ris. 1 Skema af det elektromagnetiske relæ
Ris. 1 Skema af det elektromagnetiske relæ
I driftsprocessen skelner det elektromagnetiske relæ på en tidsskala fire faser: perioden (tidspunktet) for aktivering tav, arbejdsperioden twork, perioden (tiden) for nedlukning tooff, perioden (tiden) for hvile tp (fig. . 2).
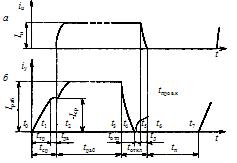
Ris. 2. Afhængighed af mængderne af output (a) og output (b) til tiden
Aktiveringsperiode for et elektromagnetisk relæ
 Svarperioden omfatter tidsintervallet fra det øjeblik, indgangssignalet begynder at påvirke overvågningsorganet, indtil signalet vises i det kontrollerede kredsløb. Segmentet af abscisseaksen tav = t2 –t0 svarer til denne periode i fig. 2, b. I øjeblikket t0 stiger strømmen i relæspolen til en værdi, ved hvilken den elektromagnetiske kraft Fe, der virker på ankeret, begynder at modvirke fjederkraften Fm (mekanisk kraft) af det mellemliggende legeme. Indgangsværdien kaldes så acceptværdien.
Svarperioden omfatter tidsintervallet fra det øjeblik, indgangssignalet begynder at påvirke overvågningsorganet, indtil signalet vises i det kontrollerede kredsløb. Segmentet af abscisseaksen tav = t2 –t0 svarer til denne periode i fig. 2, b. I øjeblikket t0 stiger strømmen i relæspolen til en værdi, ved hvilken den elektromagnetiske kraft Fe, der virker på ankeret, begynder at modvirke fjederkraften Fm (mekanisk kraft) af det mellemliggende legeme. Indgangsværdien kaldes så acceptværdien.
Den indledende periode svarer til segmentet ttr = t1 — t0. På tidspunktet t1 begynder relæelektromagnetens anker at bevæge sig. Under tdv = t2 — t1 bevæger ankeret sig, overvinder modstanden fra det mellemliggende legeme B (se fig. 1) og aktiverer det udøvende organ C.
Ved slutningen af ankerslaget lukker drivkontakterne, belastningsstrømmen i (fig. 2, a) begynder at stige fra nul til en ligevægtsværdi. Indgangsværdien, ved hvilken styringen af udgangskredsløbet begynder, kaldes acceptværdien (Iav). Effekten Psr svarende til Isr kaldes aktiveringskraften.
Responstid t cf = ttr + tdv.
Svartiden for elektromagnetiske relæer varierer fra 1-2 til 20 ms. Elektromagnetiske tidsrelæer giver en forsinkelse på op til 10 s.
For at estimere relæets responstid er det tilladt at bruge udtrykket
t cf = t1kz-bm –a,
hvor t1 er responstiden for en given sikkerhedsfaktor ks og faktor m = 1; a, b - koefficienter, der bestemmes afhængigt af typen af relæ og værdierne af kz og m.
For højhastighedsrelæer ved kz = 1,5¸2 nærmer værdien af koefficienten a sig. For almindelige relæer med k z = 1,5¸3, værdien a = 0,25¸0,95, er værdien af koefficienten b normalt i området 1,4-1,6.
Driftsperiode for det elektromagnetiske relæ
 Arbejdsperioden omfatter tidsintervallet twork = t3 — t2, dvs. tiden fra tidspunktet for kontrol af udgangskredsløbet t2 til tidspunktet for afslutning af indvirkningen på det følsomme organ af indgangssignalet t3. Strømmen begynder at stige til en stationær værdi af Iwork (fig. 2, b) - dette er arbejdsværdien af inputværdien, som sikrer pålidelig drift af relæet.
Arbejdsperioden omfatter tidsintervallet twork = t3 — t2, dvs. tiden fra tidspunktet for kontrol af udgangskredsløbet t2 til tidspunktet for afslutning af indvirkningen på det følsomme organ af indgangssignalet t3. Strømmen begynder at stige til en stationær værdi af Iwork (fig. 2, b) - dette er arbejdsværdien af inputværdien, som sikrer pålidelig drift af relæet.
Forholdet Iwork / Icr = kz kaldes sikkerhedsfaktoren på arbejdet.
For at karakterisere overbelastningskapaciteten af relæets følsomme element anvendes værdien af indgangsmængden, som kaldes grænseværdien for driftsmængden Idrift.max.
Begrænsning af arbejdsværdien - dette er dens værdi, som det følsomme organ kan modstå i en kort normaliseret periode. Værdien af denne værdi er dog uacceptabel, når relæet fungerer i normal tilstand på grund af tilstanden af elektrisk eller mekanisk styrke eller opvarmning.
Styreeffektkonceptet Ru bruges til at karakterisere relædrevets bæreevne. Styreeffekt er den effekt i det kontrollerede kredsløb, som drevet kan overføre i lang tid.
Elektromagnetisk relæudløsningsperiode
 Off-perioden indeholder tidsintervallet toff = t6 — t3, dvs. tiden fra tidspunktet for ophør af påvirkningen på det opfattende organ t3 til det øjeblik, hvor strømmen i det kontrollerede kredsløb falder til nul (fig. 16, a).
Off-perioden indeholder tidsintervallet toff = t6 — t3, dvs. tiden fra tidspunktet for ophør af påvirkningen på det opfattende organ t3 til det øjeblik, hvor strømmen i det kontrollerede kredsløb falder til nul (fig. 16, a).
Fra-perioden inkluderer frigivelsesperioden totp = t4 — t3, hvor relæet er slukket. Strømmen iy i relæspolen falder til nul (fig. 2, b). I denne periode overstiger den modsatte fjederkraft (mekanisk kraft) den elektromagnetiske kraft, dvs. Fm> Fe og ankeret frigives.
Efter valg af en kontaktfejl (interval tc = t5 — t4), åbner relækontakterne, og der tændes en lysbue mellem dem, som slukker efter tiden td = t6 — t5. I løbet af perioden td falder strømmen i det styrede kredsløb fra In til nul (fig. 2, a).
Off-tid t t = tp + tc + td.
Udløsningsperioden er karakteriseret ved en genvindingsfaktor, som er forholdet mellem faldstrømmen Iotp og pickupstrømmen Iav: kv = Iotp / Icr.
For strømsystembeskyttelsesrelæer og styrerelæer, der styrer inputparameteren inden for snævre grænser, bør kv typisk være tættere på enhed.
Hvileperiode for det elektromagnetiske relæ
Hvileperioden er tidsintervallet tp = t7 — t6.
Latensperioden er karakteriseret ved en parameter kaldet den inoperative værdi, som er den største værdi af inputmængden, hvilket sikrer, at relæet ikke fungerer eller holdes. Nedlukningstiden er kortere end driftsstarttiden og udløsningstiden.
Forholdet mellem styreeffekt og aktiveringseffekt kaldes forstærkning, ku = Py / Pcr.
Antallet af starter pr. tidsenhed bestemmes af en værdi, der er omvendt proportional med cyklustiden:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota O.B.