Elektrisk aksel og dens anvendelse i det elektriske drev af metalskæremaskiner
 Artiklen diskuterer enheden, funktionsprincippet og eksempler på brugen af elektriske systemer til synkron rotation (elektrisk aksel) i metalskærende maskiner og installationer.
Artiklen diskuterer enheden, funktionsprincippet og eksempler på brugen af elektriske systemer til synkron rotation (elektrisk aksel) i metalskærende maskiner og installationer.
Antag, at to aksler, der ikke er mekanisk forbundet med hinanden, skal rotere med samme hastighed uden at dreje i forhold til hinanden. For at sikre en sådan synkron og i-fase rotation med motorer D1 og D2, som roterer henholdsvis aksler A og II (fig. 1), forbindes de asynkrone hjælpemaskiner A1 og A2 med faserotorer. Rotorviklingerne på disse maskiner er forbundet mod hinanden.
Hvis de to maskiners omdrejningshastigheder og deres rotorers positioner er de samme, så er de elektromotoriske kræfter induceret i vindingerne af rotorerne på maskinerne A1 og A2 ens og rettet mod hinanden (fig. 2, a), og strømmen løber ikke i rotorkredsløbet.
Antag, at omdrejningsretningen af hjælpemaskinernes felt falder sammen med deres rotorers rotationsretning.Når rotationen af maskine A2 sænkes, vil dens rotor halte bagud i forhold til A1, hvilket resulterer i f.eks. etc. c. Ep2 induceret i rotorviklingen vil skifte i fase til fremrykningen (fig. 2, b), og i rotorkredsløbet af maskinerne A1 og A2 under påvirkning af vektorsummen af e. etc. med E vises udligningsstrømmen Az.
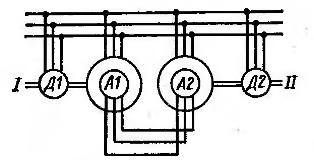
Ris. 1. Ordning for synkron kommunikation
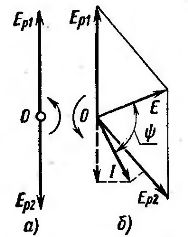
Ris. 2. Vektordiagrammer af det synkrone kommunikationssystem
Den aktuelle vektor I vil ligge efter vektoren e. etc. med E i vinklen φ... Aktuel vektorprojektion Az på vektoren e osv. v. Ep2 falder sammen med denne vektor i retning. Projektionen af den aktuelle vektor på vektoren e. etc. s. Ep1 er rettet mod ham. Det følger heraf, at maskine A2 vil fungere i motortilstand og maskine A1 i generatortilstand. I dette tilfælde vil akslen på maskine A2 blive accelereret, og akslen på maskine A1 vil blive decelereret. På den måde vil maskinerne udvikle drejningsmomenter, der genopretter akslernes synkrone rotation. I og II og den tidligere koordinerede position i rummet af rotorerne på maskinerne A1 og A2. Disse maskiners rotorer kan rotere både i feltets rotationsretning og i den modsatte retning.
Dette system kaldes et elektrisk synkronrotationssystem... Det kaldes også en elektrisk aksel... Synkronrotationssystemet kan erstatte f.eks. blyskruer i skruebænke.
Da tilførselskredsløbene i metalskæremaskiner, sammenlignet med hovedbevægelsens kredsløb, normalt bruger lav strøm, kan et enklere skema med synkron rotation bruges til at synkronisere hovedbevægelsen med tilførslen (fig. 3).I dette tilfælde er et konstant misforhold mellem positionerne af rotorerne på maskinerne A1 og A2 uundgåeligt, uden hvilket der ikke ville være nogen strøm i rotorkredsløbet på maskinen A2, og det ville ikke være i stand til at overvinde momentet af modstandskræfterne af forsyningskredsløbet. Da A2-maskinen modtager strøm fra statoren og rotoren, kræver dette elektriske akselsystem en seks-leder forbindelse til motoren, installeret i mange tilfælde på en bevægelig maskinblok, normalt vist med den stiplede linje.
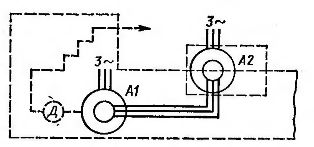
Ris. 3. Synkrone kommunikationssystemer af en tung skrue drejebænk
Inden for vinkelafvigelsen, som ikke overstiger 90 °, øges det elektriske synkroniseringsmoment. For at sikre et betydeligt synkroniseringsmoment skal synkrone kommunikationsmaskiner ved alle mulige vinkelfrekvenser arbejde med store slip (ikke mindre end 0,3 — 0,5). Derfor skal disse maskiner være store nok til at undgå uacceptabel opvarmning.
Maskinernes kraft øges yderligere i et forsøg på at eliminere indflydelsen fra belastningsudsving og friktionskræfter. Der anvendes også mekaniske transmissioner, som reducerer maskinakslernes rotationsfrekvens og følgelig størrelsen af vinkelfejlen reduceret til maskinakslen Inden driften af den elektriske aksel påbegyndes, er asynkronmaskinerne A1 og A2 forbundet med en enfaset strømforsyning. I dette tilfælde indtager rotoren på maskinen A2 sin begyndelsesposition, som svarer til positionen af rotoren på maskinen A1.
Synkrone rotationssystemer rationelt brugt til tungmetalskæremaskiner, da produktionen af lange blyskruer er forbundet med betydelige vanskeligheder.Derudover, når længden af skruerne eller akslerne øges, på grund af deres vridning, falder nøjagtigheden af koordineringen af det indbyrdes arrangement af maskindelene. I et elektrisk akselsystem kan afstanden mellem akslerne ikke påvirke nøjagtigheden af operationen.
Ved brug af en elektrisk aksel elimineres de mekaniske forbindelser af kaliberne til spindlen, og det kinematiske diagram er meget forenklet. En væsentlig ulempe ved elektriske akselsystemer i sværmetalskæremaskiner er muligheden for beskadigelse af en dyr del under et strømsvigt, da der straks opstår fejljustering. I nogle tilfælde, i en sådan ulykke, kan beskadigelse af emnet forhindres ved hurtig automatisk tilbagetrækning af værktøjet.
Et skema med to identiske asynkronmotorer med faserotorer er af interesse for maskinteknik (fig. 4). Da begge rotorers kredsløb er lukket til reostaten R, begynder begge rotorer at rotere, når motorerne er tilsluttet AC-nettet.
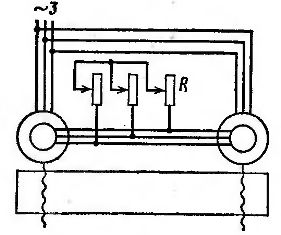
Ris. 4. Ordning for synkron kommunikation med en roterende rheostat
Ud over de strømme, der løber i rotor- og reostatviklingerne, løber der en udligningsstrøm i begge maskiners rotorkredsløb. Tilstedeværelsen af denne strøm forårsager et synkroniseringsmoment, som resulterer i, at maskinerne roterer synkront. Dette system kan bruges til at hæve og sænke tværarmene på store høvle, overfræsere og karruseller.
Takket være det elektriske akselsystem er problemet med koordineret bevægelse af transportører, der er en del af et produktionskompleks, løst.Den mest praktiske anvendelse i dette tilfælde opnås fra varianten af synkron rotation af motorer med en fælles frekvensomformer.
Ud over de overvejede elektriske akselsystemer til maskinbygning er der udviklet og anvendt andre AC maskinsystemer, herunder enfasede systemer og systemer med synkronmotorer af speciel konstruktion.