Strukturelle former for asynkronmotorer
 Eksterne strukturelle former asynkrone motorer bestemmes af den måde, motoren er monteret på, og formen for dens beskyttelse mod påvirkning fra miljøet. Normal benmotorik er udbredt (fig. 1, a). I dette tilfælde skal motorakslen være vandret. Motorer med flanger (fig. 1, b) er meget udbredt til vandrette og lodrette installationer.
Eksterne strukturelle former asynkrone motorer bestemmes af den måde, motoren er monteret på, og formen for dens beskyttelse mod påvirkning fra miljøet. Normal benmotorik er udbredt (fig. 1, a). I dette tilfælde skal motorakslen være vandret. Motorer med flanger (fig. 1, b) er meget udbredt til vandrette og lodrette installationer.
De producerer også inline-induktionsmotorer, der ikke har nogen ramme, endeskærme, aksel. Elementer af en sådan motor er indlejret i delene af maskinens krop, og motorakslen er en af maskinakslerne (ofte spindlen), og sengen er kroppen af maskinsamlingen, for eksempel et slibehoved (fig. . 2).
Specialdesignmotorer distribueres bredt i udlandet, herunder motorer med små radiale dimensioner og betydelig længde, og skivemotorer, især med en cylinderformet stator og en ringformet ydre rotor. Motorer bruges også, når de er tændt, bevæger rotoren, som har form som en kegle, sig i en aksial retning og udvikler en betydelig trykkraft.
Denne kraft bruges til at frigøre den mekaniske bremse, der virker på motorakslen, efter at motoren er afbrudt fra lysnettet. Derudover bruges adskillige motordesigns med påmonterede gearkasser, gearkasser og mekaniske variatorer, der giver jævn regulering.
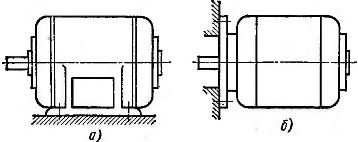
Ris. 1. Design af asynkronmotorer
Ulempen ved at bruge motorer med specielle designformer er vanskeligheden ved at udskifte dem i tilfælde af en ulykke. En defekt elmotor bør ikke udskiftes, men repareres, og maskinen gå i tomgang under reparationen.
Motorer med forskellige former for miljøbeskyttelse bruges til at drive maskinerne.
Afskærmede motorer har gitter, der dækker ventilationsåbningerne på endeskjoldene. Dette forhindrer fremmedlegemer i at trænge ind i motoren og forhindrer også arbejderen i at røre ved roterende og strømførende dele. For at forhindre væskedråber i at falde ned ovenfra er motorerne udstyret med nedadgående eller lodrette udluftninger.
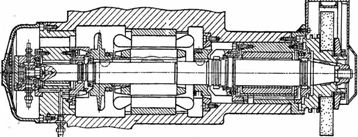
Ris. 2. Indbygget slibemotor
Men når en sådan elektrisk motor arbejder på et værksted, suger dens blæser sammen med luft støv ind, sprøjter kølervæske eller olie samt små partikler af stål eller støbejern, som klæber til viklingens isolering og vibrerer. under påvirkning af et vekslende magnetfelt, slider isoleringen hurtigt op.
Lukkede motorer, hvis slutskærme ikke har ventilationshuller, har mere pålidelig beskyttelse mod miljøpåvirkninger. Sådanne motorer, med samme dimensioner som beskyttede, har på grund af dårligere køling mindre kraft.Med de samme kræfter og hastigheder er den lukkede elektriske motor 1,5-2 gange tungere end den beskyttede, og derfor er dens pris højere.
Ønsket om at reducere størrelsen og omkostningerne ved lukkede motorer førte til oprettelsen af lukkede blæste elektriske motorer. En sådan elektrisk motor har en ekstern ventilator monteret på enden af motorakslen modsat drivenden og dækket med en hætte. Denne blæser blæser rundt om motorhuset.
Ventilatormotorer er væsentligt lettere og billigere end lukkede. Blæste motorer bruges oftest til at drive metalskæremaskiner. Motorer med andre former for miljøbeskyttelse bruges relativt sjældent til at drive metalskæremaskiner. Især lukkede elektriske motorer bruges nogle gange til at drive slibemaskiner.
Elektriske motorer er designet til standardspændinger på 127, 220 og 380 V. Den samme motor kan tilsluttes netværk med forskellige spændinger, for eksempel til netværk med spændinger på 127 og 220 V, 220 og 380 V. med to spændinger, f.eks. statorviklingen af den elektriske motor er forbundet i en trekant, for en større - i en stjerne. Strømmen i den elektriske motors viklinger og spændingen i dem vil være den samme i begge tilfælde med denne inklusion. Derudover producerer de elektriske motorer 500 V, deres statorer er permanent forbundet i en stjerne.
Asynkrone egern-burmotorer, der anvendes i mange industrier, produceres med en mærkeeffekt på 0,6-100 kW pr. synkrone hastigheder 600, 750, 1000, 1500 og 3000 o/min.
Tværsnittet af ledningerne i viklingen af den elektriske motor afhænger af størrelsen af strømmen, der strømmer gennem den. Med en større strøm vil motorviklingen have et større volumen.Tværsnittet af det magnetiske kredsløb er proportionalt med størrelsen af den magnetiske flux. På denne måde bestemmes dimensionerne af den elektriske motor af de beregnede værdier af strøm og magnetisk flux eller det nominelle drejningsmoment for den elektriske motor. Nominel motoreffekt

hvor P.n — nominel effekt, kW, Mn- nominelt moment, N • m, nn- nominel hastighed, rpm.
Nominel effekt for samme motorstørrelse stiger, efterhånden som dens nominelle hastighed stiger. Derfor er lavhastighedselektriske motorer større end højhastighedsmotorer med samme effekt.
Ved slibning af små huller kræves der meget høje slibespindelhastigheder for at opnå passende skærehastigheder. Så når der slibes med et hjul med en diameter på 3 mm ved en hastighed på kun 30 m / s, skal spindlens hastighed være lig med 200.000 omdrejninger i minuttet. Ved høje spindelhastigheder kan spændekraften reduceres kraftigt. Samtidig reduceres hjulslibning og dornbøjning, og overfladefinishen og bearbejdningsnøjagtigheden øges.
I forbindelse med ovenstående anvender branchen talrige modeller af de såkaldte. Elektriske spindler med omdrejningshastigheder på 12.000-144.000 rpm og højere. Elektrospindelen (fig. 3, a) er en slibespindel på rullelejer med en indbygget højfrekvent egern-burmotor. Motorrotoren er placeret mellem to lejer for enden af spindlen modsat slibeskiven.
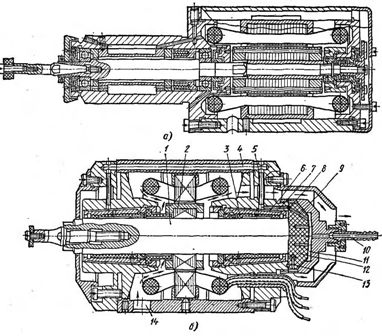
Ris. 3. Elektrospindler
Den elektriske spindel stator er samlet af stålplade. En bipolær spole er placeret på den.Motorrotoren ved hastigheder op til 30.000-50.000 omdr./min. er også indstillet fra metalplade og forsynet med en konventionel kortslutningsvikling. De har en tendens til at reducere rotorens diameter så meget som muligt.
Valget af lejetype er af særlig betydning for driften af elektrospindler. Præcisionskuglelejer er almindeligt anvendte, som fungerer med en forspænding skabt ved hjælp af kalibrerede fjedre. Sådanne lejer bruges til rotationshastigheder, der ikke overstiger 100.000 omdrejninger i minuttet.
Aerostatiske lejer er meget udbredt i industrien (fig. 3, b). Akslen 1 på højfrekvenselektromotoren roterer i luftsmurte lejer 3. Den aksiale belastning optages af luftpuden mellem enden af akslen og støttelejet 12, mod hvilken akslen presses under trykket af luften, der tilføres det indre af huset gennem hullet 14 til afkøling af motoren. komprimeret luft passerer gennem filteret og kommer ind gennem fittingen 10 i kammeret 11. Herfra, gennem kanalen 9 og den cirkulære rille 8, passerer luften ind i kanalen 7 og kammeret 6. Derfra kommer luften ind i lejet hul. Luft tilføres til venstre leje gennem rør 5 og kanaler 4 i motorhuset.
Udblæsningsluften udledes gennem kanalerne 13. Luftpuden i understøtningslejespalten skabes af luften, der passerer fra kammeret 11 gennem lejet fremstillet af porøs carbongrafit. Hvert leje har tilspidset messing. En carbon grafit liner presses ind i den, hvis porer er fyldt med bronze. Inden elektrospindelen startes, tilføres luft, og der dannes luftpuder mellem spindlen og bøsningerne. Dette eliminerer friktion og slid på lejerne under opstart.Derefter tændes motoren, hastigheden af rotoren 2 når den nominelle hastighed på 5-10 s. Når motoren er slukket, ruller rotor 2 i 3-4 minutter. For at reducere denne tid bruges en elektrisk bremse.
Brugen af airbags reducerer friktionstabene i den elektriske spindel drastisk, luftforbruget er 6-25 m3/t.
Der er også brugt elektrospindler på lejer med flydende smøring. Deres drift kræver kontinuerlig cirkulation af olie under højt tryk, ellers bliver opvarmningen af lejerne uacceptabel.
Produktionen af højfrekvente elektriske motorer kræver præcisionsfremstilling af individuelle dele, dynamisk afbalancering af rotoren, præcis samling og sikring af streng ensartethed af mellemrummet mellem statoren og rotoren. Frekvensen af strømmen, der forsyner den højfrekvente elektriske motor, vælges afhængigt af den nødvendige hastighed for den elektriske motor:

hvor nHvis den elektriske motors synkrone rotationsfrekvens, rpm, f er frekvensen af strømmen, Hz, p er antallet af poler, da p = 1, så

Ved synkrone omdrejningshastigheder for de elektriske spindler på 12.000 og 120.000 rpm bør strømfrekvensen være lig med henholdsvis 200 og 2000 Hz.
Specielle generatorer bruges til at drive højfrekvente motorer. I fig. 4 viser en trefaset synkron induktionsgenerator. Generatorstatoren har brede og smalle slidser. Feltspolen, som er placeret i statorens brede slidser, forsynes med jævnstrøm. Det magnetiske felt af lederne i denne spole er lukket gennem statortænderne og rotorfremspringene som vist i fig. 4 med stiplet linje.
Når rotoren roterer, krydser det magnetiske felt, der bevæger sig langs rotorfremspringene, vindingerne af vekselstrømsviklingen placeret i statorens smalle slidser og inducerer en vekselvis e. etc. c. Hyppigheden af denne e. etc. v. afhænger af hastigheden og antallet af rotorører. De elektromotoriske kræfter induceret af den samme flux i de feltviklede viklinger ophæver hinanden på grund af den forestående aktivering af spolerne. Feltspolerne forsynes af en ensretter tilsluttet lysnettet. Statoren og rotoren har magnetiske kerner af elektrisk stålplade.
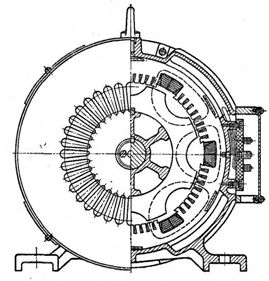
Ris. 4. Højfrekvent induktionsgenerator
Generatorer med det beskrevne design produceres til nominel effekt fra 1 til 3 kW og frekvenser fra 300 til 2400 Hz. Generatorerne drives af asynkronmotorer med en synkron hastighed på 3000 rpm.
Induktionsgeneratorer med øget frekvens begynder at blive erstattet af halvleder (tyristor) omformere. I dette tilfælde giver de normalt muligheden for at ændre strømmens frekvens og derfor evnen til at justere den elektriske motors rotationshastighed. Hvis spændingen holdes konstant under en sådan regulering, udføres konstant effektregulering. Hvis forholdet mellem spænding og frekvens af strømmen (og derfor den magnetiske flux af motoren) holdes konstant, udføres reguleringen med en konstant ved alle hastigheder i lang tid tilladt drejningsmoment.
Fordelene ved drev med en tyristor frekvensomformer og asynkron egern-burmotor er høj effektivitet og brugervenlighed. Ulempen er stadig den høje pris.I maskinteknik anbefales det mest at bruge et sådant drev til højfrekvente motorer. Eksperimentelle drev af denne type er blevet skabt i vores land.
Laveffekt tofasede asynkronmotorer bruges ofte i værktøjsmaskiner. Statoren af en sådan motor har to viklinger: feltvikling 1 og kontrolvikling 2 (fig. 5, a). Rotor 4 i et egernbur har en stor aktiv modstand. Spolernes akse er vinkelret på hinanden.
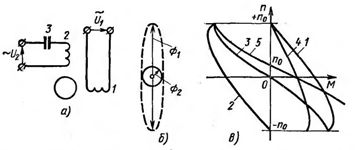
Ris. 5. Skema af en to-faset induktionsmotor og dens egenskaber
Spændingerne Ul og U2 påføres viklingerne. Når kondensatoren 3 er forbundet med spolens 2 kredsløb, overstiger strømmen i den strømmen i spolen 1. I dette tilfælde dannes et roterende elliptisk magnetfelt, og egernets rotor 4 begynder at rotere. Hvis du reducerer spændingen U2, vil strømmen i spole 2 også falde. Dette vil føre til en ændring i formen af ellipsen af det roterende magnetfelt, som bliver mere og mere aflangt (fig. 5, b).
En elliptisk feltmotor kan betragtes som to motorer på en aksel, den ene arbejder med et pulserende felt F1 og den anden med et cirkulært felt F2. F1-motoren med pulserende felter kan opfattes som to identiske cirkulære induktionsmotorer, der er forbundet til at rotere i modsatte retninger.
I fig. 5, c viser de mekaniske karakteristika 1 og 2 for en induktionsmotor med et cirkulært rotationsfelt og en betydelig aktiv modstand af rotoren ved rotation i forskellige retninger. Den mekaniske karakteristik 3 for en enfaset motor kan konstrueres ved at subtrahere momenterne M af karakteristika 1 og 2 for hver værdi af n.Ved enhver værdi af n stoppes drejningsmomentet for en enfaset motor med høj rotormodstand. Den mekaniske karakteristik af den cirkulære feltmotor er repræsenteret af kurve 4.
Den mekaniske karakteristik 5 for en tofasemotor kan konstrueres ved at trække momenterne M af karakteristika 3 og 4 fra ved en hvilken som helst værdi af n. Værdien af n0 er rotationshastigheden af en tofaset induktionsmotor ved ideel tomgangshastighed. Ved at justere forsyningsstrømmen for spole 2 (fig. 5, a), er det muligt at ændre hældningen af karakteristika 4 (fig. 5, c), og dermed værdien af n0. På denne måde udføres hastighedsstyringen af en tofaset induktionsmotor.
Ved drift med høje slipværdier bliver tabene i rotoren ret betydelige. Af denne grund bruges den betragtede regulering kun til hjælpedrev med lav effekt. For at reducere accelerations- og decelerationstiden anvendes tofasede induktionsmotorer med en hul rotor. I en sådan motor er rotoren en tyndvægget hul cylinder af aluminium.