Princippet for drift af frekvensomformeren og kriterierne for dens valg til brugeren
 En kort beskrivelse af formålet, driftsprincippet og kriterierne for valg af en frekvensomformer som styreenhed for en asynkron elektrisk motor.
En kort beskrivelse af formålet, driftsprincippet og kriterierne for valg af en frekvensomformer som styreenhed for en asynkron elektrisk motor.
Egernbur induktionsmotor i dag er det den mest massive og pålidelige enhed til styring af forskellige maskiner og mekanismer. Men hver medalje har en bagside.
De to største ulemper ved induktionsmotoren er umuligheden af enkel rotorhastighedskontrol, meget stor startstrøm - fem, syv gange den nominelle. Hvis der kun anvendes mekaniske styreanordninger, fører disse ulemper til store energitab og stødmekaniske belastninger. Dette har en ekstrem negativ effekt på udstyrets levetid.
Frekvensomformer

Frekvensomformer med pulsbreddestyring (PE med PWM) reducerer startstrømmene med 4-5 gange. Det giver en jævn start af induktionsmotoren og styrer drevet i henhold til et givet spændings-/frekvensforhold.
Frekvensomformeren giver energibesparelser på op til 50 %. Det bliver muligt at tillade feedback mellem tilstødende enheder, dvs. selvjusterende udstyr til opgaven og ændring af driftsforholdene for hele systemet.
Princippet for drift af frekvensomformeren
PWM frekvensomformeren er dobbelt konvertering inverter… Først ensrettes netspændingen 220 eller 380 V af indgangsdiodebroen, derefter udjævnes og filtreres den ved hjælp af kondensatorer.
Dette er den første fase af transformationen. På andet trin, fra konstant spænding, ved hjælp af kontrolmikrokredsløb og en udgangsbro IGBT switche, dannes en PWM-sekvens med en bestemt frekvens og arbejdscyklus. Ved udgangen af frekvensomformeren udsendes pakker med rektangulære impulser, men på grund af induktansen af induktionsmotorens statorviklinger integreres de og bliver til sidst til en spænding tæt på en sinusformet.
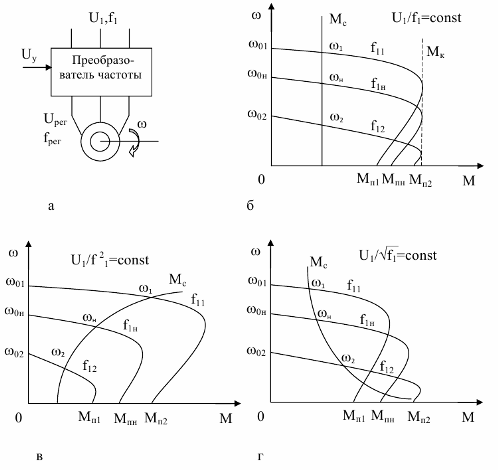 Mekaniske egenskaber for en asynkron elektrisk motor med frekvensregulering af hastigheden: a — tilslutningsdiagram; b — karakteristika for en belastning med et konstant statisk modstandsmoment; c — ventilatorbelastningsegenskaber; d — statiske belastningsmomentkarakteristika, omvendt proportional med omdrejningsvinkelhastigheden.
Mekaniske egenskaber for en asynkron elektrisk motor med frekvensregulering af hastigheden: a — tilslutningsdiagram; b — karakteristika for en belastning med et konstant statisk modstandsmoment; c — ventilatorbelastningsegenskaber; d — statiske belastningsmomentkarakteristika, omvendt proportional med omdrejningsvinkelhastigheden.
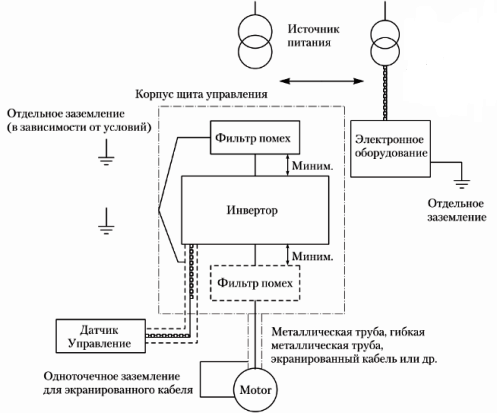 Et typisk kredsløb til at tænde en frekvensomformer
Et typisk kredsløb til at tænde en frekvensomformer 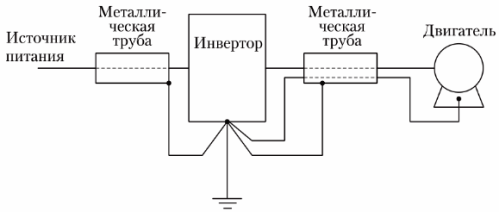 Et eksempel på tilslutning af strømledninger (kabler) i et frekvensomformerkredsløb
Et eksempel på tilslutning af strømledninger (kabler) i et frekvensomformerkredsløb
Kriterier for valg af frekvensomformere

Ved kontrolmetoden
Kassér straks de omformere, der ikke er egnede med hensyn til effekt, ydelsestype, overbelastningskapacitet osv. Afhængigt af typen af ledelse skal du beslutte, hvad du skal vælge, skalar eller vektorkontrol.
De fleste moderne frekvensomformere implementerer vektorstyring, men sådanne frekvensomformere er dyrere end skalære frekvensomformere.
Vektorstyring muliggør mere præcis kontrol ved at reducere statiske fejl. Skalartilstand understøtter kun et konstant forhold mellem udgangsspændingen og udgangsfrekvensen, men for for eksempel ventilatorer er dette ganske tilstrækkeligt.
Siden starten er vektorstyring blevet en ekstremt populær kontrolstrategi for induktionsmotorer. I øjeblikket implementerer de fleste frekvensomformere vektorstyring eller endda sensorløs vektorstyring (denne tendens findes i frekvensomformere, der oprindeligt implementerer skalarstyring og ikke har terminaler til tilslutning af en hastighedssensor).
Det grundlæggende princip for vektorstyring består i separat uafhængig regulering af motorens magnetiseringsstrøm og kvadraturstrømmen, som akslens mekaniske drejningsmoment er proportional med. Magnetiseringsstrømmen bestemmer værdien af rotorens nulfluxforbindelse og holdes konstant.
Når hastigheden stabiliseres, genereres kvadraturstrømmens sætpunkt ved hjælp af en separat PI-regulator, hvis input er uoverensstemmelsen mellem den ønskede og målte motorhastighed. Kvadraturstrømmen er således altid indstillet til minimumsniveauet for at give tilstrækkeligt mekanisk drejningsmoment til at opretholde den indstillede hastighed. Derfor har vektorstyring høj energieffektivitet.
Gennem magt
Hvis udstyrets effekt er omtrent den samme, så vælg omformere fra samme virksomhed med en kapacitet i henhold til effekten af den maksimale belastning. Dette vil sikre udskiftelighed og forenkle vedligeholdelse af udstyr. Det anbefales, at servicecentret for den valgte frekvensomformer er i din by.
Via netspænding
Vælg altid en konverter med det bredest mulige spændingsområde, både ned og op. Faktum er, at for lokale netværk kan selve ordet standard kun fremkalde latter gennem tårer. Hvis den lave spænding højst sandsynligt vil få frekvensomformeren til at stoppe, så kan den øgede spænding få netelektrolytiske kondensatorer til at eksplodere og enhedens input til at svigte.
Efter frekvensjusteringsområde

Ved antallet af kontrolindgange
Der kræves diskrete input for at indlæse styrekommandoer (start, stop, omvendt, stop osv.). Analoge indgange er nødvendige for feedbacksignaler (indstilling og indstilling af drevet under drift). Digitale input er nødvendige for at indlæse højfrekvente signaler fra digitale hastigheds- og positionssensorer (indkodere). Antallet af input kan aldrig blive for stort, men jo flere input, jo mere komplekst kan systemet bygges og jo dyrere er det.
Ved antallet af udgangssignaler
Diskrete udgange bruges til at udsende signaler for forskellige hændelser (alarm, overophedning, indgangsspænding over eller under niveau, fejlsignal osv.). Analoge udgange bruges til at bygge komplekse feedbacksystemer. Valganbefalinger ligner det foregående afsnit.
Kontrol bus
Udstyret, som du vil styre frekvensomformeren med, skal have samme bus og antal ind-/udgange som den valgte frekvensomformer. Efterlad lidt plads til input og output til fremtidige opgraderinger.
Garantien virker stadig
Garantiperioden giver dig indirekte mulighed for at evaluere pålideligheden af frekvensomformeren. Du bør naturligvis vælge en frekvensomformer med en langsigtet plan.Nogle producenter sørger specifikt for tilfælde af skader, der ikke er dækket af garantien. Læs altid dokumentationen omhyggeligt og søg online efter anmeldelser af udstyrsmodeller og producenter. Dette vil hjælpe dig med at træffe det rigtige valg. Spar ikke penge på kvalitetsservice og personaleuddannelse.
 Frekvensomformer på stativ
Frekvensomformer på stativ
Overbelastningskapacitet
Som en første tilnærmelse bør effekten af frekvensomformeren vælges 10-15 % mere end motoreffekten. Omformerens strøm bør være højere end motorens mærkestrøm og lidt højere end strømmen af mulige overbelastninger.
I beskrivelsen af en bestemt mekanisme er overbelastningsstrømmene og varigheden af deres strømning normalt angivet. Læs dokumentationen! Dette vil holde dig underholdt og muligvis forhindre skader på udstyr i fremtiden. Hvis drevet også er kendetegnet ved stød (spidsbelastninger) (belastninger i 2-3 sekunder), så er det nødvendigt at vælge en konverter til spidsstrømmen. Tag 10% margin igen.
Se også om dette emne: VLT AQUA Drive frekvensomformere til pumpeenheder