Karakteristika for enfasede induktionsmotorer
Enfasede asynkronmotorer er meget udbredt i teknologi og hverdagsliv. Produktionen af enfasede asynkrone elektriske motorer fra en brøkdel af en watt til hundredvis af watt er mere end halvdelen af produktionen af alle laveffektmaskiner, og deres effekt er konstant stigende.
Enfasede motorer er generelt opdelt i to kategorier:
-
motorer til generelle formål «, som omfatter elektriske motorer til industri og husholdninger;
-
motorer til automatiske enheder — kontrollerede og ukontrollerede vekselstrømsmotorer og specialiserede elektriske maskiner med lav effekt (tachogeneratorer, roterende transformatorer, selsins osv.).
En betydelig del af de asynkrone elektriske motorer er motorer til generelle formål, der er designet til at fungere på et enfaset AC-netværk. Der er dog en ret omfattende gruppe af universelle asynkrone elektriske motorer designet til at fungere i både enfasede og trefasede netværk.
Designet af universelle motorer adskiller sig praktisk talt ikke fra traditionelt design af trefasede asynkrone maskiner… Ved drift på et trefaset netværk har disse motorer egenskaber svarende til dem for trefasede motorer.
Enfasede motorer har en egern-burrotor, og statorviklingen kan fremstilles i forskellige versioner. Oftest placeres en arbejdsvikling, der fylder to tredjedele af slidserne, og en startvikling, der fylder den resterende tredjedel af slidserne, på statoren. Kørespolen beregnes for kontinuerlig drift, og startspolen beregnes kun for startperioden. Derfor er den lavet af tråd med et lille tværsnit og indeholder et betydeligt antal vindinger. For at skabe startmoment inkluderer startviklingen faseskiftende elementer - modstande eller kondensatorer.
Asynkrone motorer med lav effekt kan være tofasede, når arbejdsviklingen placeret på statoren har to faser blandet i rummet med 90 °. I en af faserne er et faseskiftende element konstant inkluderet - en kondensator eller modstand Top, der giver en vis faseforskydning mellem spolestrømmene.
Det kaldes normalt en motor med en kondensator permanent forbundet til en af faserne kondensator… Kapacitansen af den faseskiftende kondensator kan være konstant, men i nogle tilfælde kan kapacitansværdien være forskellig for opstart og for driftstilstand.
Et karakteristisk træk ved enfasede asynkronmotorer er evnen til at rotere rotoren i forskellige retninger. Rotationsretningen bestemmes af retningen af det indledende drejningsmoment.
Ved lav rotormodstand (Ccr < 1) kan en enfaset motor derfor ikke fungere i omvendt tilstand. Motortilstanden svarer til rotoromdrejningerne 0 <n <nc ved en højere hastighed finder generatortilstanden sted.
Et kendetegn ved enfasede motorer er, at dets maksimale drejningsmoment afhænger af rotorens modstand. Efterhånden som rotorens aktive modstand stiger, falder det maksimale drejningsmoment og med store modstandsværdier Skr > 1 bliver det negativt.
Når du vælger typen af elektrisk motor til at drive en enhed eller mekanisme, er det nødvendigt at kende dens egenskaber.De vigtigste er drejningsmomentegenskaber (indledende startmoment, maksimalt drejningsmoment, minimumsmoment), rotationsfrekvens, vibroakustiske egenskaber. I nogle tilfælde kræves der også energi- og vægtegenskaber.
Som et eksempel beregnes egenskaberne for en enfaset motor med følgende parametre:
-
antal faser - 1;
-
netfrekvens — 50 Hz;
-
netspænding - 220 V;
-
aktiv modstand af statorviklingen - 5 ohm;
-
induktiv modstand af statorviklingen - 9,42 Ohm;
-
induktiv modstand af rotorviklingen - 5,6 Ohm;
-
aksial længde af maskinen - 0,1 m;
-
antallet af omdrejninger i statorviklingen -320;
-
statorhulsradius - 0,0382 m;
-
antal kanaler - 48;
-
luftspalte - 1,0 x 103 m.
-
rotorinduktansfaktor 1,036.
Den enfasede vikling fylder to tredjedele af statorslidserne.
I fig. 1 viser afhængigheden af strømmen af en enfaset elektrisk motor og det elektromagnetiske slipmoment. I den ideelle tomgangstilstand har den motorstrøm, der forbruges af netværket, hovedsagelig for at skabe et magnetfelt, en relativt stor værdi.
For en simuleret motor er størrelsen af magnetiseringsstrømmen omkring 30% af startstrømmen, for trefasede motorer med samme effekt - 10-15%.Det elektromagnetiske moment i den ideelle tomgangstilstand har en negativ værdi, som stiger, når modstanden i rotorkredsløbet stiger. På glider C= 1, det elektromagnetiske moment er nul, hvilket bekræfter den korrekte funktion af modellen.
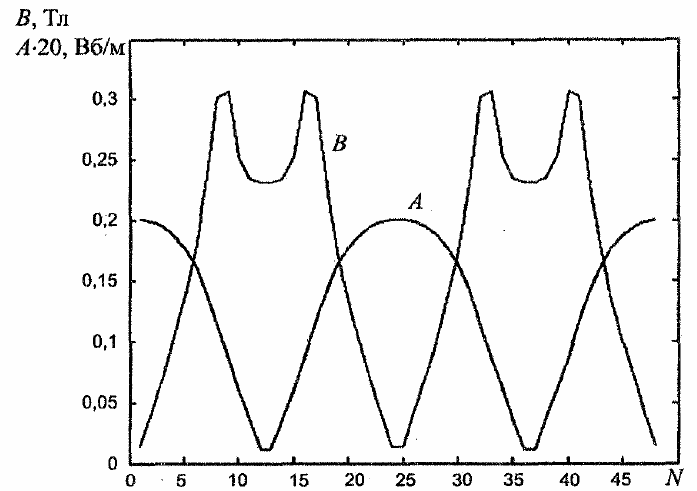
Fig. 1. Konvolutterne af vektorpotentiale og magnetisk induktion i motorgabet under glidning s = 1
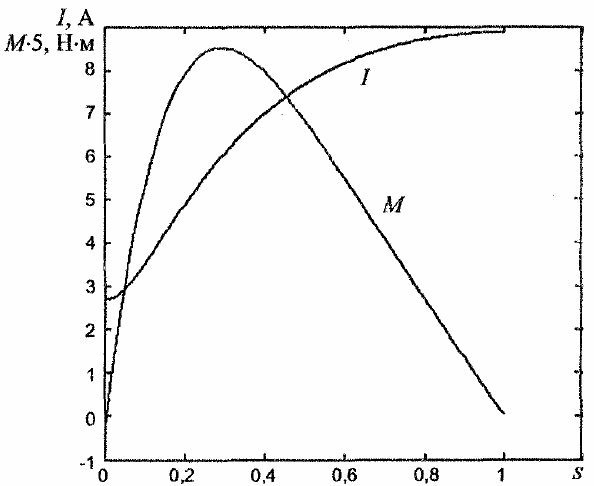
Ris. 2. Afhængighed af strøm og elektromagnetisk drejningsmoment for en enfaset asynkronmotor på slip
Afhængighederne af nyttig og forbrugt strøm på slip (fig. 3) har en traditionel karakter. Effektiviteten af motoren i den ideelle tomgangstilstand har et negativt fortegn svarende til det negative drejningsmoment, og effektfaktoren i denne tilstand er meget lav (0,125 for den simulerede motor).
Den lavere værdi af effektfaktoren sammenlignet med trefasede motorer forklares af den høje størrelse af magnetiseringsstrømmen. Efterhånden som belastningen stiger, stiger værdien af effektfaktoren og bliver sammenlignelig med trefasede motorers værdi (fig. 4).
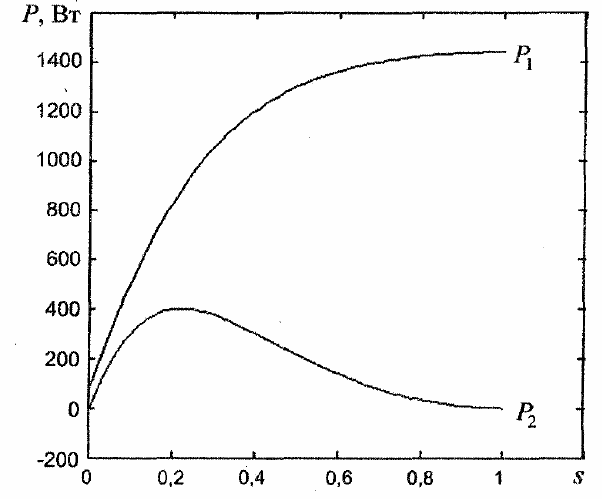
Ris. 3. Afhængighed af den nyttige og forbrugte effekt af en enfaset asynkronmotor på slip
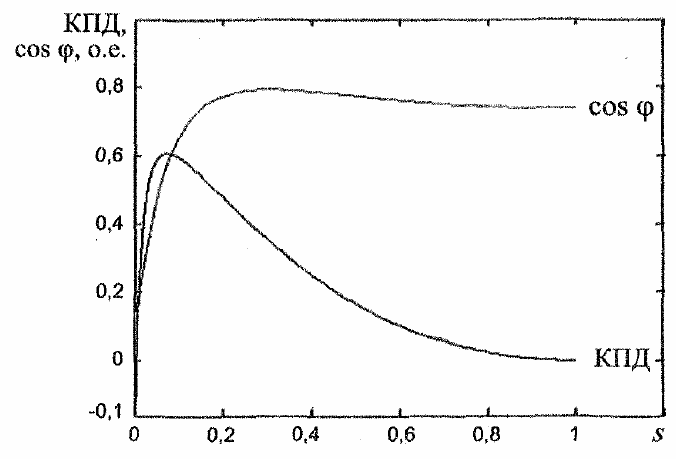
Ris. 4. Afhængighed af koefficienten for nyttig virkning og effekt af en enfaset asynkronmotor på slip
Efterhånden som rotorens aktive modstand stiger, falder størrelsen af det elektromagnetiske moment, og ved kritiske glidninger over enhed bliver det negativt.
I fig. 5 viser afhængigheden af det elektromagnetiske moment af en enfaset slipmotor for forskellige værdier af den elektriske ledningsevne af motorens sekundære medium.
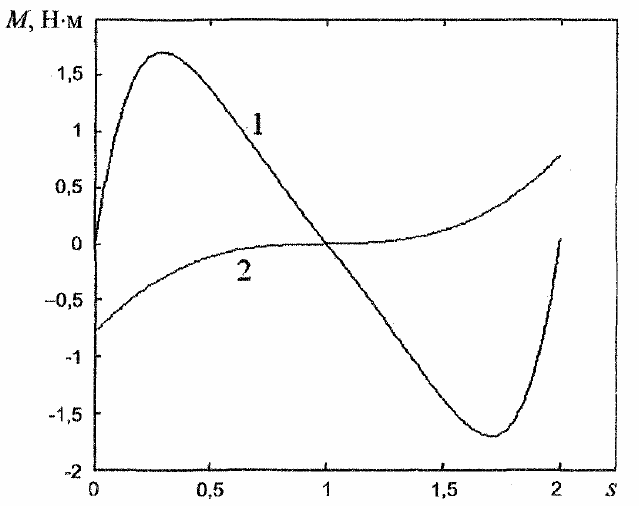
Ris. 5.Afhængighed af det elektromagnetiske moment af en enfaset slipmotor ved forskellige rotormodstande (1 — 17 x 106 Cm/m, 2 — 1,7 x 106 Cm/m)
Kondensatormotorer har to viklinger permanent forbundet til nettet. En af dem er forbundet direkte til netværket, den anden er forbundet i serie med en kondensator, der giver den nødvendige faseforskydning.
Begge viklinger optager det samme antal slidser på statoren, og antallet af deres vindinger og kapacitansen af kondensatoren beregnes på en sådan måde, at der med en vis glidning tilvejebringes et cirkulært roterende magnetfelt. Oftest accepteres den nominelle seddel som sådan. I dette tilfælde viser det oprindelige drejningsmoment sig dog at være meget mindre end det nominelle.
Det magnetiske felt i den indledende tilstand er elliptisk; påvirkningen af magnetfeltets modgående komponenter er stærkt påvirket. Hvis kondensatorens kapacitans øges ved at vælge den fra betingelsen om at opnå et cirkulært felt ved opstart, så er der et fald i drejningsmomentet og en fald i energiindikatorerne ved nominelt slip.
En tredje variant er også mulig, når det cirkulære felt svarer til et slip med en større størrelse end i den nominelle tilstand. Men denne vej er heller ikke optimal, da stigningen i drejningsmomentet er ledsaget af en betydelig stigning i tab. En stigning i startmomentet for en kondensatormotor kan opnås ved at øge rotorens aktive modstand. Denne metode fører til en stigning i tab med hver slip, som et resultat af hvilken effektiviteten af motoren falder.
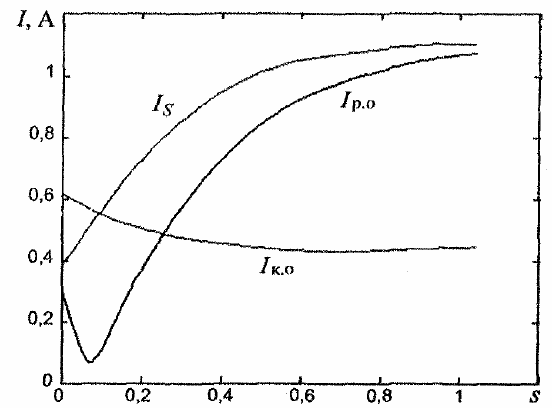
Ris. 6.Afhængighed af slipkondensatormotorstrømme (Azp.o — driftsspolestrøm, Azk.o — kondensatorspolestrøm, E — motorstrøm)
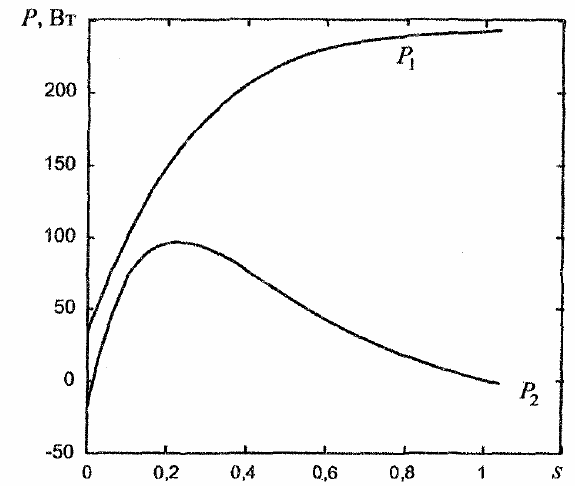
Ris. 7. Afhængighed af den forbrugte P1 og nyttige P2-slipeffekt af en kondensator
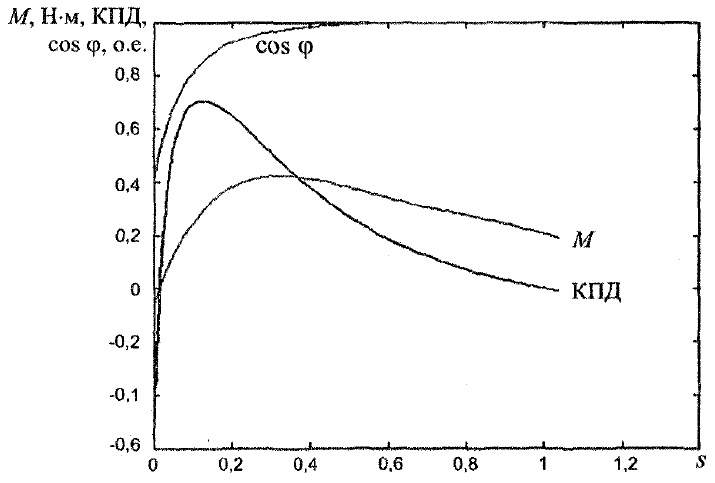
Ris. 8. Afhængighed af koefficienten for nyttig virkning og effekt og det elektromagnetiske moment af slipkondensatormotoren
Kondensatormotoren har ganske tilfredsstillende energiydelse, en høj effektfaktor, hvis værdi overstiger effektfaktoren for en trefaset motor, og med øget rotormodstand og betydelig kapacitet, højt startmoment. Samtidig har motoren, som nævnt ovenfor, en reduceret virkningsgrad.
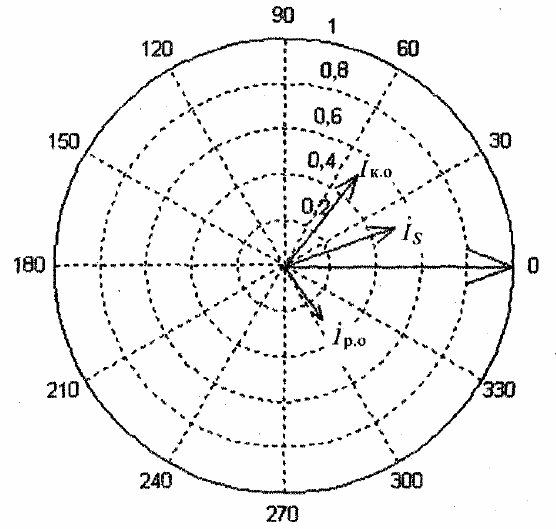
Ris. 9. Vektordiagram af en kondensatormotor ved slip s = 0,1
Vektordiagrammet (fig. 9) viser, at ved den valgte værdi af kondensatorkapacitansen er kondensatorspolestrømmen førende i forhold til netværksspændingen, og arbejdsspolens strøm halter. Diagrammet viser også, at når man glider tæt på nominel, er motorens magnetfelt elliptisk. For at opnå et cirkulært felt skal kondensatorens kapacitansværdi reduceres, så strømmene i de to spoler er lige store.
Se også om dette emne:Multi-speed enfaset kondensatormotorer