Lukkede automatiske styresystemer
 Lukkede automatiske kontrolsystemer (ACS) adskiller sig fra åbne kredsløb i det anvendte udstyr og i fuldstændigheden af automatisering. Med ACS åben modtager hovedenheden (inklusive styreudstyret) ikke information om den faktiske driftstilstand for den elektriske installation (køremotor, kørende maskine).
Lukkede automatiske kontrolsystemer (ACS) adskiller sig fra åbne kredsløb i det anvendte udstyr og i fuldstændigheden af automatisering. Med ACS åben modtager hovedenheden (inklusive styreudstyret) ikke information om den faktiske driftstilstand for den elektriske installation (køremotor, kørende maskine).
I en lukket ASUB transmitteres information til kontrolelementerne, som er ledsaget af indsendelse af passende kommandosignaler. Kredsløbet, der transmitterer sådan information, lukker kontrolsløjfen og danner en lukket ACS eller feedback ACS.
Forskellen mellem lukket og åben ACS kan forklares med eksemplet med styring af hastigheden af en elektrisk motor i et generator-motor (G-D) system. Med ACS åben (fig. 1, a) indstilles elmotorens indstillede hastighed manuelt af potentiometer P. Hastighedsjusteringen udføres visuelt af en omdrejningstæller, som drives af TG tachogeneratoren. Enhver hastighedsafvigelse fra sætpunktet elimineres af operatøren ved at aktivere potentiometerskyderen.
I en lukket ACS (fig.1, b) ankeret på TG-tachogeneratoren er inkluderet i excitationskredsløbet for OVG-generatoren, hvilket skaber et lukket eller feedback-system (i dette tilfælde med hastighedsfeedback).
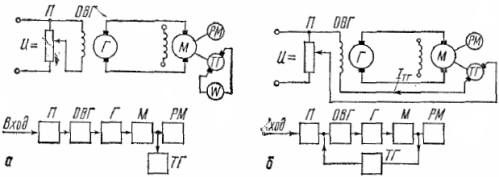
Ris. 1. Styrekredsløb for elektrisk motor i G -M-systemet: a — åben ACS, b — lukket ACS
Strømmen genereret af tachogeneratoren (Aztg) i et lukket kredsløb rettet mod strømmen af potentiometeret (Azn), og den resulterende strøm virker i kredsløbet svarende til den geometriske forskel af disse strømme. Ved hjælp af skyderen på potentiometeret indstiller operatøren værdien af den resulterende strøm i excitationsspolen på OVG, ved hvilken den tilsvarende hastighed af den elektriske motor er tilvejebragt. Det er her operatørens rolle slutter. I fremtiden opretholder systemet automatisk den indstillede driftstilstand for det elektriske drev med en vis nøjagtighed.
Antag, at elmotorens hastighed som følge af belastningsspidsen er faldet i forhold til den specificerede. Reduktionen i hastigheden er ledsaget af en tilsvarende reduktion i tachogeneratorens hastighed og spændingen ved dens terminaler. Dette vil igen føre til et fald i strømmen Aztg i feedbackkredsløbet og i en bestemt position af potentiometerets skyder - en stigning i den resulterende strøm i generatorens excitationsvikling. Generatorspændingen og motorhastigheden vil stige tilsvarende.
Processen med at øge hastigheden og spændingen vil fortsætte, indtil strømmen i feedbacksløjfen når den indstillede værdi, og motorhastigheden når den indstillede værdi.
I analysen af automatiske kontrolsystemer, funktionsdiagrammer… I fig.2 transmissionsfunktionsskema for ACS, som inkluderer følgende elementer:
1 — hovedenhed, der indstiller driftstilstanden, giver en kommando, startimpuls eller signal,
2 — sammenligningselement. Det inkluderer signalet X1 fra masteren, signalet X0, som bestemmer hastigheden eller niveauet af den kontrollerede værdi. Under hensyntagen til signalet fra det niende hovedfeedback-element sammenligner element 2 de modtagne signaler og sender det yderligere korrigerede signal X2,
3 — det transformerende element, signalet op transformerer det til en anden form, mere bekvemt for yderligere transmission. For eksempel leveres signalet X2 i form af hydraulisk (pneumatisk, mekanisk) tryk Element 3 omdanner det til en elektrisk strøm. Da denne form for transformation kan kræve yderligere energi, er element 3 forbundet med en PE-energikilde,
4 — tilføjelse af element, det modtager to signaler: X3 og X8 fra korrektionselementet (hukommelseselement) 8. Disse signaler summeres af element 4 og sendes til det næste element,
5 — forstærkerelement, indgangssignalet X1 kan være svagt og skal forstærkes til efterfølgende transmission. Dette gøres gennem element 5, som er forbundet til PE-strømkilden,
6 — executive element, udfører det modtagne signal (elektrisk motor, elektromagnetisk relæ, servomotor),
7 — justerbar genstand eller arbejdsmaskine.
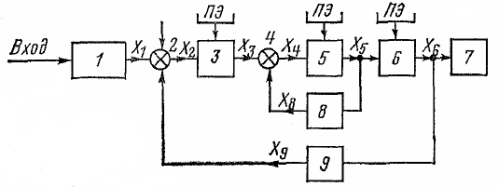
Ris. 2. Funktionelt diagram af ACS
Hvert automatiseringselement er en energiomformer, ved hvis input værdien X' anvendes, og værdien X fjernes fra outputtet. «For hvert element i en stationær tilstand er der en vis afhængighed X» (X'), kaldet en statisk karakteristik.
Et lukket automatisk kontrolsystem er kendetegnet ved tilstedeværelsen af feedback; den har mindst én feedback-sløjfe, der forbinder systemets output med dets input. Derudover kan der være såkaldt intern feedback, der forbinder de enkelte ACS-elementers output og input.
Feedback er opdelt i hård og fleksibel. Hårde begrænsninger fungerer både i forbigående og stationære driftstilstande af systemet, fleksible - kun i forbigående. Skel på positiv og negativ feedback. Når den regulerede værdi stiger, øger den positive forbindelse den endnu mere, og den negative falder tværtimod. Feedbacks kan transmittere signaler proportionalt med omdrejningsvinkel, hastighed, spænding, strøm osv. og kaldes vinkel, hastighed, spænding, strømtilbagemeldinger i overensstemmelse hermed. For flere detaljer se her: Elementer af automationssystemer
I henhold til driftsprincippet kan ACS opdeles i tre grupper:
-
kontinuerlig drift, hvor forholdet mellem de kontrollerede og indstillede værdier ikke er brudt,
-
impulshandling, hvor forbindelsen mellem den kontrollerede og den indstillede værdi finder sted med jævne mellemrum,
-
relæhandling, hvor kommunikation kun sker, når en værdi når en bestemt værdi.
Afhængigt af den lov, hvorefter en given værdi ændres over tid, kan ACS også opdeles i tre grupper:
-
konstant eller lavt sætpunktssystemer, hvor den automatisk styrede værdi holdes konstant. Disse er stabiliseringssystemer, som i det væsentlige er automatiske kontrolsystemer (ACS),
-
systemer, hvor målværdien ændres i henhold til et specifikt, forudbestemt program. Det er et softwarestyringssystem,
-
systemer, hvor en given værdi kan variere meget og i henhold til en vilkårlig lov, dvs. sporingssystemer.