Hvad er mekatronik, mekatroniske elementer, moduler, maskiner og systemer
Ordet "mekatronik" er dannet af to ord - "mekanik" og "elektronik". Dette udtryk blev foreslået i 1969 af en seniorudvikler hos Yaskawa Electric, en japaner ved navn Tetsuro Mori. I det 20. århundrede specialiserede Yaskawa Electric sig i udvikling og forbedring af elektriske drev og DC-motorer og opnåede derfor stor succes i denne retning, for eksempel blev den første disc-anker DC-motor udviklet der.
Dette blev efterfulgt af udviklinger vedrørende de første hardware CNC-systemer. Og i 1972 blev mærket Mechatronics registreret her. Virksomheden gjorde hurtigt store fremskridt i udviklingen af elektriske drivteknologier. Virksomheden besluttede sig senere for at droppe ordet "Mechatronics" som et varemærke, da begrebet blev meget brugt både i Japan og rundt om i verden.

Under alle omstændigheder er Japan hjemsted for den mest aktive udvikling af en sådan tilgang inden for teknologi, da det blev nødvendigt at kombinere mekaniske elementer, elektriske maskiner, kraftelektronik, mikroprocessorer og software for at implementere højpræcision elektrisk drevstyring.
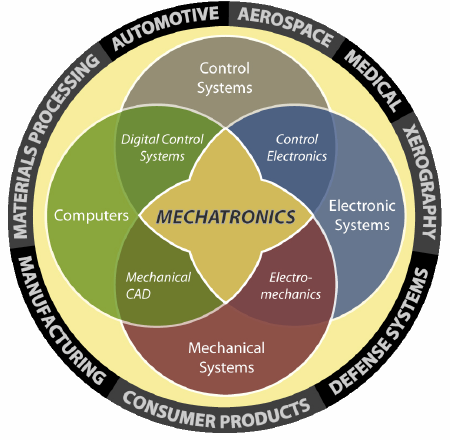
Et almindeligt grafisk symbol for mekatronik er et diagram fra RPI (Rensselaer Polytechnic Institute, NY, USA) hjemmeside:
Mekatronik er et af de nyeste ingeniørområder i verden, som ifølge UNESCO er et af de ti mest lovende og eftertragtede.
Generelt kan begrebet "mekatronik" gives følgende definition - det er et område inden for videnskab og teknologi baseret på en systematisk kombination af enheder til finmekanik, elektroteknik, elektronik, mikroprocessorteknologi, forskellige strømkilder, elektriske, hydrauliske og pneumatiske drev, såvel som deres intelligente styring, fokuserede på skabelsen og driften af blokke af moderne automatiserede produktionssystemer.
Mekatronik er computerstyret bevægelseskontrol.
Målet med mekatronik er at skabe kvalitativt nye bevægelsesmoduler, mekatroniske bevægelsesmoduler, intelligente mekatroniske moduler og på grundlag heraf bevægelige intelligente maskiner og systemer.
Historisk set udviklede mekatronik sig fra elektromekanik og, afhængig af dens resultater, gik den videre ved systematisk at kombinere elektromekaniske systemer med computerstyringsenheder, indlejrede sensorer og grænseflader.

Diagram over det mekatroniske system
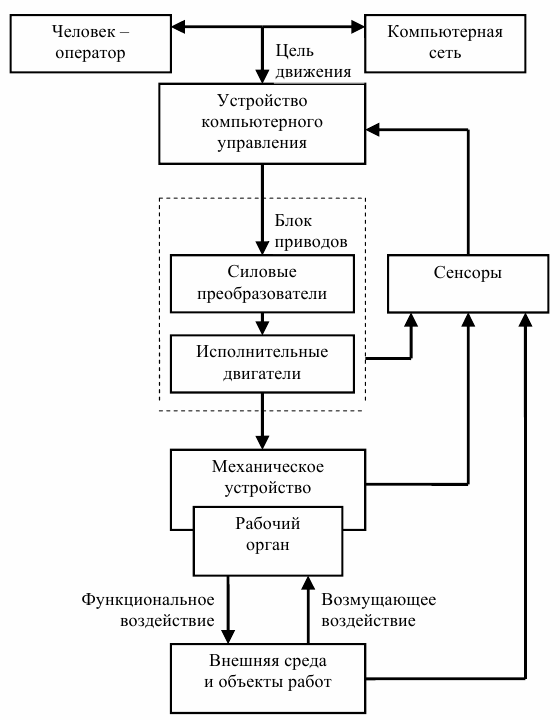
Generaliseret struktur af mekatroniske systemer
Elektroniske, digitale, mekaniske, elektriske, hydrauliske, pneumatiske og informationselementer — kan være en del af det mekatroniske system, da elementer af anden fysisk karakter dog i første omgang er samlet for at opnå et kvalitativt nyt resultat af systemet, som ikke kan opnås af hvert element som af en separat performer.

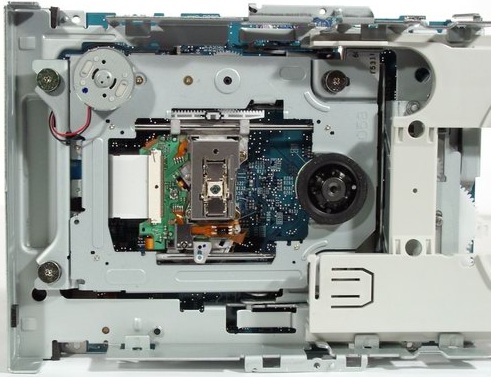
En separat spindelmotor vil ikke være i stand til at skubbe DVD-afspillerbakken ud af sig selv, men under kontrol af et kredsløb med mikrocontrollersoftware og korrekt forbundet til et ormegear, vil alt fungere nemt og ligne et simpelt monolitisk system. På trods af den ydre enkelhed omfatter et mekatronisk system per definition flere mekatroniske enheder og moduler, der er forbundet og interagerer sammen for at udføre specifikke funktionelle handlinger for at løse en specifik opgave.
Et mekatronisk modul er et uafhængigt produkt (strukturelt og funktionelt) designet til at udføre bevægelser med interpenetration og samtidig målrettet hardware- og softwareintegration af dets komponenter.
Et typisk mekatronisk system består af indbyrdes forbundne elektromekaniske komponenter og strømkomponenter, der igen styres af en computer eller mikrocontrollere.
Når de designer og bygger et sådant mekatronisk system, forsøger de at undgå unødvendige noder og grænseflader, forsøger at gøre alt kortfattet og så sømløst som muligt, ikke kun for at forbedre enhedens massestørrelseskarakteristika, men også for at øge pålideligheden af systemet generelt.
Nogle gange er det ikke nemt for ingeniører, de er tvunget til at finde meget usædvanlige løsninger netop på grund af det faktum, at forskellige enheder er i forskellige arbejdsforhold og laver helt forskellige ting. For eksempel vil et konventionelt leje nogle steder ikke fungere, og det erstattes af en elektromagnetisk suspension (dette gøres især i turbiner, der pumper gas gennem rør, da et konventionelt leje hurtigt ville svigte på grund af indtrængning af gas i dets smøremiddel).
På en eller anden måde har mekatronikken i dag gennemsyret alt fra husholdningsapparater til byggerobotik, våben og rumfart. Alle CNC-maskiner, harddiske, elektriske låse, ABS-systemet i din bil mv. — overalt er mekatronik ikke kun nyttig, men også nødvendig. Det er efterhånden sjældent, hvor du kan finde manuel styring, det hele bunder i, at du trykkede på knappen uden fiksering eller blot rørte ved sensoren — du fik resultatet — dette er måske det mest primitive eksempel på, hvad mekatronik er i dag.
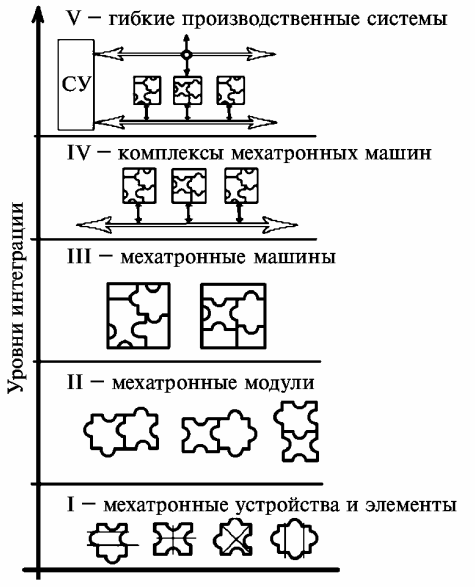
Hierarkidiagram over integrationsniveauer i mekatronik
Det første integrationsniveau er dannet af mekatroniske enheder og deres elementer. Det andet integrationsniveau er dannet af de integrerede mekatroniske moduler. Det tredje integrationsniveau er dannet af integrationsmekatroniske maskiner. Det fjerde integrationsniveau er dannet af komplekserne af mekatroniske maskiner. Det femte integrationsniveau er dannet på en enkelt integrationsplatform af komplekser af mekatroniske maskiner og robotter, hvilket indebærer dannelsen af rekonfigurerbare fleksible produktionssystemer.
I dag er mekatroniske moduler og systemer meget udbredt inden for følgende områder:
-
maskinteknik og automationsudstyr, teknologiske processer inden for maskinteknik;
-
industriel og speciel robotteknologi;
-
luftfart og rumteknologi;
-
militært udstyr, køretøjer til politiet og specialtjenester;
-
elektronisk teknik og hurtig prototyping udstyr;
-
bilindustrien (motorhjulstrækmoduler, blokeringsfrie bremser, automatiske transmissioner, automatiske parkeringssystemer);
-
ikke-traditionelle køretøjer (elbiler, elektriske cykler, kørestole);
-
kontorudstyr (f.eks. kopimaskiner og faxmaskiner);
-
computerudstyr (f.eks. printere, plottere, cd-rom-drev);
-
medicinsk udstyr og sportsudstyr (bioelektriske og eksoskeletproteser til handicappede, toningstrænere, kontrollerede diagnostiske kapsler, massageapparater osv.);
-
husholdningsapparater (vask, syning, opvaskemaskiner, uafhængige støvsugere);
-
mikromaskiner (til medicin, bioteknologi, kommunikation og telekommunikation);
-
kontrol- og måleudstyr og -maskiner;
-
elevator- og lagerudstyr, automatiske døre i hoteller og lufthavne; foto- og videoudstyr (videodiskafspillere, videokamera-fokuseringsanordninger);
-
simulatorer til træning af operatører af komplekse tekniske systemer og piloter;
-
jernbanetransport (togkontrol- og stabiliseringssystemer);
-
intelligente maskiner til fødevare-, kød- og mejeriindustrien;
-
trykkemaskiner;
-
smarte enheder til showindustrien, attraktioner.
Derfor er behovet for personale med mekatroniske teknologier stigende.