Eksempler på LAD-sprogprogrammer til programmerbare logiske controllere
Et af de vigtigste og ganske almindelige programmeringssprog industrielle logiske controllere (PLC) er et stigelogisk sprog — Ladder Diagram (Eng. LD, Eng. LAD, Russian RKS).
Dette grafiske programmeringssprog er baseret på repræsentationen af koblingsdiagrammer og er praktisk for elektroingeniøren, fordi de normalt lukkede og normalt åbne kontaktelementer i LAD-sproget kan forbindes med normalt lukkede og normalt åbne kontakter i elektriske kredsløb.
Siden midten af XX har relæautomatiseringssystemer været meget brugt i industrien i århundreder. I begyndelsen af 70'erne. relæmaskiner begyndte gradvist at blive erstattet af programmerbare controllere. I et stykke tid arbejdede begge samtidigt og var bemandet af de samme personer. Således opstod opgaven med at "overføre" relækredsløbene til PLC'en.
Forskellige muligheder for softwareimplementering af relækredsløb er blevet skabt af næsten alle førende PLC-producenter.På grund af sin enkelhed i præsentationen opnåede LAD en velfortjent popularitet, hvilket var hovedårsagen til dets optagelse i IEC-standarden.
Syntaksen for LAD-kommandoer er meget lig syntaksen for Ladder-beskrivelsessproget. Denne repræsentation giver dig mulighed for at spore "energiflowet" mellem dækkene, når det passerer gennem de forskellige kontakter, komponenter og udgangselementer (spoler).
Koblingskredsløbselementer, såsom normalt åbne kontakter og normalt lukkede kontakter, er grupperet i segmenter. Et eller flere segmenter danner en logisk blokkodesektion.
Programgrænsefladen, skrevet i LAD-sprog, er klar og enkel, fordi kontrol-LAD-programmet er cyklisk og består af rækker forbundet fra venstre af en lodret bus, og flowet eller fraværet af strøm i kredsløbet svarer til et resultat logisk operation (sand - strøm løber; falsk - ingen strøm).
Billed 1 og 2 viser segmenter af programmet, der beskriver to handlinger til styring af transportørmotoren i LAD-sproget:
-
et tryk på en hvilken som helst «Start»-knap starter motoren;
-
et tryk på en vilkårlig «Stop»-knap eller aktivering af sensoren vil slukke for motoren.

Ris. 1. Start af motoren efter at have trykket på en vilkårlig «Start»-knap
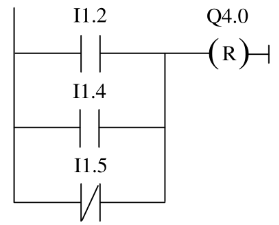
Ris. 2. Slukning af motoren efter tryk på en "Stop"-knap eller udløsning af sensoren
Den anden opgave er at bestemme bevægelsesretningen for transportbåndet. Antag, at to fotoelektriske sensorer (REV 1 og REV 2) er installeret på bæltet for at bestemme objektets bevægelsesretning. Begge fungerer som normalt åbne kontakter.
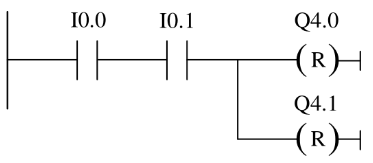
I fig. 3 - 4 præsenteres segmenter af LAD-sprogprogrammer for tre aktioner:
-
hvis signalet ved indgang 10.0 skifter fra «0» til «1» (stigende flanke), og tilstanden af signalet ved indgang I0.1 er lig med «0», så bevæger transportbåndsobjektet sig til venstre;
-
hvis signalet ved indgang 10.1 skifter fra «0» til «1» (stigende flanke), og tilstanden af signalet ved indgang I0.0 er lig med «0», så bevæger transportbåndsobjektet sig til højre;
-
hvis begge fotosensorer er dækket, betyder det, at objektet er mellem sensorerne.
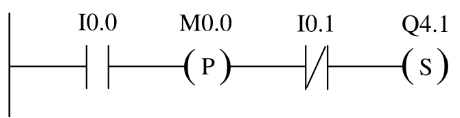
Ris. 3. Objektets bevægelse til venstre, hvis input I0.0 ændrer tilstanden fra «0» til «1» og input I0.1 er lig med «0»
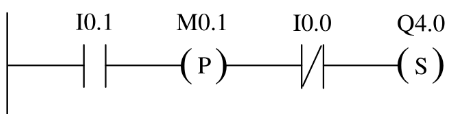
Ris. 4. Flyt objektet til højre, hvis input I0.1 ændres fra «0» til «1» og input I0.0 er lig med «0»
Ris. 5.Find en genstand mellem sensorerne
I fig. 3 — 4 notation vedtaget:
-
input 1.0 (REV 1) — fotosensor # 1;
-
input 10.1 (REV 2) — fotosensor # 2;
-
M0.0 (PMV 1) — tidsmarkør nr. 1;
-
М0.1 (РМВ 2) — tidsmarkør nr. 2;
-
output Q4.0 (VENSTRE) — venstre bevægelsesindikator;
-
udgang Q4.1 (HØJRE) — højre bevægelsesindikator.
I fig. 6 — 9 præsenterer de enkleste fire-handlings timerprogrammer:
-
hvis timer T1 atus er lig med «0», starter tidsværdien på 250 ms i T1, og T1 starter som en forlænget pulstimer;
-
timertilstanden er midlertidigt lagret i et hjælpetoken;
-
hvis tilstanden for timeren T1 er «1», gå til mærket M001;
-
når timeren T1 udløber, øges mærkeord 100 med «1».
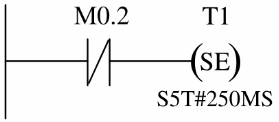
Ris. 6. Udvidet pulsstarttimer

Ris. 7... Midlertidig lagring af timertilstanden i hjælpemærket
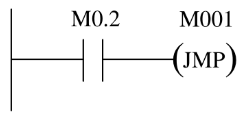
Ris. 8... Gå til etiketten

Ris. 9... Øg markøren med «1», når timeren T1 udløber
Eksempel på LAD-sprogprogram til LOGO-controller
Det universelle logikmodul LOGO! er et kompakt, funktionelt komplet produkt designet til at løse de enkleste automatiseringsopgaver med logisk informationsbehandling.

Ris. 10. LOGO-modul
Brug af LOGO-modulet! løste problemhåndteringJeg er et varmesystem i brusekabinerne i administrations- og produktionsbygningen.
Sammensætningen af varmesystemet omfatter følgende komponenter:
-
tre varmekedler, der bruges til rumopvarmning;
-
tre pumper, der cirkulerer kølevæsken;
-
rør- og varmeregistre.
Kontrolsystemet skal styre temperaturen i brusekabinerne, trykket (det første niveau er lavt, hvor yderligere arbejde er muligt, forudsat at påfyldningssystemet er tændt, og det andet kritiske niveau, hvor yderligere arbejde er forbudt) , samt kontrol af kølevæskens temperatur i varmesystemet, mangel på energiressourcer (elektricitet, gas).
Derudover kan yderligere varmekilder tilvejebringes i varmesystemet, for eksempel elektriske varmeapparater. Lad de elektriske varmeovne tænde tre gange om dagen: fra 600 til 800; fra 1500 til 1700; fra 2300 til 0100... Hvis temperaturen af en eller anden grund er under normalen på det tidspunkt, hvor arbejderne besøger bruserne, tændes de elektriske varmeovne yderligere.
Følgende bruges som input og output:
-
AI1 — indgangssignal fra tryksensoren for kølevæskens kritiske trykniveau;
-
AI2 — indgangssignal fra tryksensoren for et lavt niveau af kølevæsketryk, som tillader yderligere drift;
-
AI3 — indgangssignal fra temperatursensoren for at øge kølevæskens driftstemperatur;
-
indgang 13 — indgangssignal for mangel på elektricitet;
-
indgang 14 — indgangssignal for mangel på naturgas;
-
udgang Q1 — udgangssignal, der tænder for varmesystemet (cirkulationspumpe #1);
-
output Q2 — udgangssignal, der tænder påfyldningssystemet;
-
udgang Q3 er et udgangssignal, der slukker for varmesystemets kedler (varmekedel nr. 1);
-
output Q4 er et udgangssignal, der afbryder gasforsyningen til kedlerne;
-
udgang Q5 — udgangssignal, der tænder for varmesystemet (cirkulationspumpe #2);
-
udgang Q6 — udgangssignal, der tænder for varmesystemet (cirkulationspumpe nr. 3);
-
udgang Q7 er et udgangssignal, der slukker for varmesystemets kedler (varmekedel nr. 2);
-
udgang Q8 er et udgangssignal, der slukker for varmesystemets kedler (varmekedel nr. 3);
-
C2 — startknap.
-
B001 er en syv-dages timer med tre tilstande.
For elektriske varmeapparater:
-
AI1 — indgangssignal fra temperaturføleren til temperaturen i bruserum;
-
udgang Q1 — udgangssignal, der tænder for de elektriske varmelegemer (elektrisk varmelegeme nr. 1);
-
udgang Q2 — udgangssignal, der tænder for de elektriske varmelegemer (elektrisk varmelegeme nr. 3);
-
output Q3 er et udgangssignal, der tænder for de elektriske varmelegemer (elvarmer #3).
Et program til et automatiseret varmestyringssystem skrevet i et programmeringssprog i form af relækontaktsymboler (LAD) i softwarepakken «LOGO! Blød komfort» vist i fig. 11 og 12.
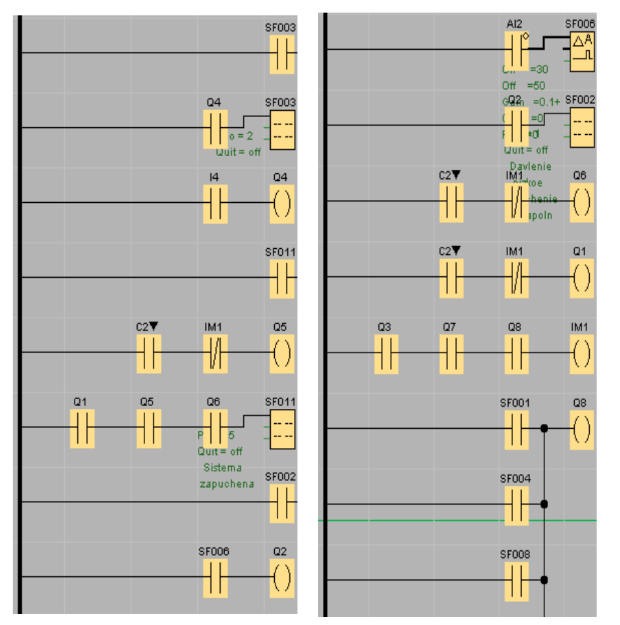
Ris. elleve. Først FraG sprogprogrammet LAD
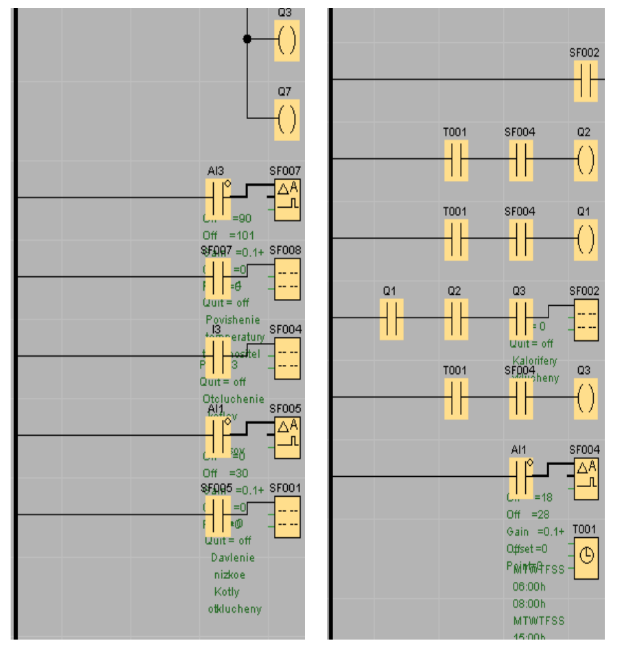
Ris.12... Det andet fragment af LAD-sprogprogrammet