Proceduren til at forberede og kompilere programmer til programmerbare controllere
Udstyrskontrolfunktioner bestemmes af procesteknologi og organisation. Derfor er de generelt ret specifikke og individuelle for hver enhed eller sted. Men når problemet med at udvikle effektiv, mobil og fleksibel software til automatiseringssystemer stilles og løses, er komplekse kontrolfunktioner normalt repræsenteret som et sæt simple elementære handlinger såsom "aktiver", "deaktiver", "implementeringsforsinkelse" osv. .
Fra disse positioner kan de fleste af kontrolfunktionerne betinget reduceres til to, som er ret almindelige for alle opgaver - logiske og regulatoriske. Førstnævnte er kendt som den generelle tidshandlingsalgoritme, og sidstnævnte er kendt som tidsparameteren. Den mest generelle præsentation af sådanne typiske funktioner til styring af teknologisk udstyr er vist i fig. 1, a og b.
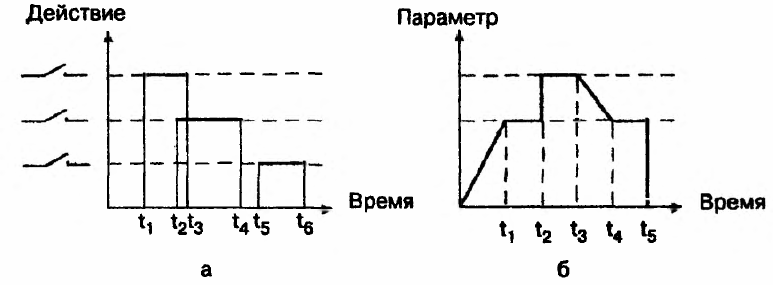
Ris. 1. Typiske kontrolfunktioner for procesudstyr
Baseret på analysen af de kvantitative karakteristika for de implementerede kontrolfunktioner i hvert specifikt eksempel på teknologisk udstyr, kan tekniske krav formuleres til en programmerbar logisk controller (PLC) som kontrolmiddel med hensyn til nøjagtighed, hastighed, antallet af parallelle opgaver, der skal løses, mængden af hukommelse, sammensætningen af perifert udstyr, dialogværktøjer mv.
IEC 61131-3-standarden beskriver 5 programmeringssprog, der er et resultat af forskningen i de mest succesrige proprietære udviklinger af verdens førende på PLC-markedet:
-
sproget for relækontaktkredsløb (RKS) eller stigediagrammer LD (stigediagram),
-
funktionsblokdiagram (FBD) sprog, FBD (funktionsblokdiagram),
-
IL (instruktionsliste) sprog — typisk assembler med akkumulator- og etiketovergange,
-
ST (Structured Text) sprog er et tekstsprog på højt niveau,
-
SFC (Sequential Function Chart) diagrammer. SFC skylder sin oprindelse til Petri-net.
PLC-sprog er meget originale og adskiller sig væsentligt fra velkendte computerprogrammeringssprog.
Standarden forpligter ikke PLC-udviklere til at implementere alle programmeringssprog. Typisk implementerer små PLC-producenter flere eller et enkelt sprog. På mange måder afhænger prioriteringen af at bruge et bestemt programmeringssprog af de historisk etablerede traditioner i industrien eller applikationsområdet.
Standardiseringen af programmeringssprog og PLC-modellen førte til fremkomsten af specialiserede virksomheder, der beskæftiger sig med design af programmeringssystemer til PLC'er, som giver overgangen fra et programmeringssprog til et maskinsprog på forskellige niveauer:
-
når du går ind i et program;
-
ved gengivelse;
-
når du ændrer eller flytter et separat kommando- eller programområde;
-
når syntaksfejl detekteres og signalerer til operatøren.
For at udføre disse opgaver kan programmeringssystemet med succes fungere i lokal tilstand, det vil sige uafhængigt af controlleren. Dette giver programmøren mulighed for at skrive et program fra et hvilket som helst passende sted og ikke i et produktionsværksted, det vil sige i et miljø, der er mere gunstigt for den kreative proces. Muligheden for modellering letter i høj grad processen med at fejlfinde programmet og forbedrer tilrettelæggelsen af arbejdet.

De vigtigste stadier af forberedelse og programmering af programmerbare controllere er som følger:
1. Bestem, hvad det kontrollerede system (kontrolobjekt) skal gøre, kontrolmålene og andre yderligere funktioner udført af styresystemet, rækkefølgen af operationer udført af aktuatorerne med hensyn til tid og tilstanden af sensorer og styreenheder.
2. Sammensæt programmets algoritme i grafisk form.
3. Bestem, hvilke moduler der er nødvendige for at forbinde sensorer, kontrolenheder, aktuatorer, alarmer og andet udstyr, der er nødvendigt for at styre stedet.
Når du vælger moduler, skal du analysere parametrene for input/output-signalerne (spændings- og strømniveauer) og modulernes funktionalitet. Vær opmærksom på muligheden for brug smarte moduler, som kan udføre forbehandling af inputsignaler og nogle lokale kontrolfunktioner, hvilket i høj grad vil reducere kompleksiteten af programmering.
4.Lav et diagram eller en tabel for at forbinde alle input- og outputenheder på kontrolobjektet og udstyr, der bruges i kontrolprocessen, til controllermodulerne.
5. Skriv et program i et af PLC-programmeringssprogene, der udfører en bestemt rækkefølge af operationer, deres sammenkobling og udvikler mulige nødsituationer.
6. Kontroller programmet for syntaksfejl og ret dem, og derefter for køretidsfejl og foretag også passende rettelser.
7. Skriv programmet og alle nødvendige driftsparametre til controlleren.
8. Efter at styresystemet er færdigmonteret, skal du kontrollere programmet i selve styreprocessen og om nødvendigt foretage mere præcise indstillinger.
9. Gem to kopier af det sidste program og gem dem på separate steder.