Sensorer af teknologiske parametre — kraft, tryk, drejningsmoment
For implementering af automatiseret og meget nøjagtig styring af teknologiske processer er det altid nødvendigt at have information om de aktuelle værdier af de vigtigste teknologiske parametre til din rådighed. Normalt bruges forskellige sensorer til dette formål: kræfter, tryk, drejningsmoment osv. Lad os se på tre typer sensorer, lad os forstå princippet om deres drift.

Først og fremmest bemærker vi, at i konstruktionen af kraft- eller drejningsmomentsensorer bruges følsomme elementer, hvis egenskaber ændres i overensstemmelse med den aktuelle grad af deformation som følge af en eller anden ekstern påvirkning.
Disse kan være elastiske metalplader, fjedre eller aksler, hvis deformation overføres til et magnetostriktivt, piezoelektrisk eller halvlederelement, hvis elektriske eller magnetiske parametre vil direkte afhænge af graden af deformation. Det vil være nok at måle denne parameter for at få en idé om størrelsen af deformationen og følgelig kraften (tryk, drejningsmoment).
Tensometriske strain gauges

Den enkleste strain gauge baseret på strain gauge wire konverter omfatter et mekanisk elastisk element, der udsættes for deformation, og en strain gauge fastgjort til det, hvis deformation omdannes direkte til et elektrisk signal.
En tynd (med en diameter på 15 til 60 mikron) nichrom-, konstantan- eller ellinvar-tråd, som er foldet med en slange og fastgjort på en filmbagside, fungerer som en strain gauge-sensor. En sådan transducer limes til overfladen, hvis deformation skal måles.
Deformationen af det mekaniske elastiske element fører til strækning eller kompression af tråden langs dens længde, mens dens tværsnit falder eller øges, hvilket påvirker ændringen i konverterens modstand til elektrisk strøm.
Ved at måle denne modstand (spændingsfald over den) får vi en idé om størrelsen af den mekaniske deformation og følgelig kraften, forudsat at de mekaniske parametre for det deformerede element er kendt.
Trykmåler momentsensorer

Til måling af kraftmomentet anvendes følsomme elastiske elementer i form af fjedre eller tynde aksler, som vrides under den teknologiske proces. Den elastiske vinkeldeformation, det vil sige den relative vinkel på begyndelsen og slutningen af fjederen, måles og omdannes til et elektrisk signal.
Det elastiske element er sædvanligvis indesluttet i et rør, hvis ene ende er fast stationær, og den anden er forbundet med en vinkelforskydningssensor, der måler divergensvinklen mellem enderne af røret og det deformerbare element.
Således opnås et signal, der bærer information om størrelsen af drejningsmomentet.For at fjerne signalet fra fjederen er ledningerne til belastningsmodstandselementet forbundet med slæberinge til børsterne.
Magnetostriktive kraftsensorer
Der er også kraftsensorer med strain gauge magnetostriktive transducere. Brugt her det omvendte magnetostriktionsfænomen (Villari-effekten), som består i, at når der påføres tryk på en kerne lavet af en jern-nikkel-legering (såsom permaloid), ændres dens magnetiske permeabilitet.
Langsgående kompression af kernen fører til ekspansion dens hysterese sløjfer, stejlheden af sløjfen falder, hvilket fører til et fald i værdien af den magnetiske permeabilitet, henholdsvis - til et fald i induktansen eller den gensidige induktans af sensorviklingerne.
Da de magnetiske egenskaber er ikke-lineære og også på grund af det faktum, at de er væsentligt påvirket af temperaturen, bliver det nødvendigt at bruge et kompensationskredsløb.
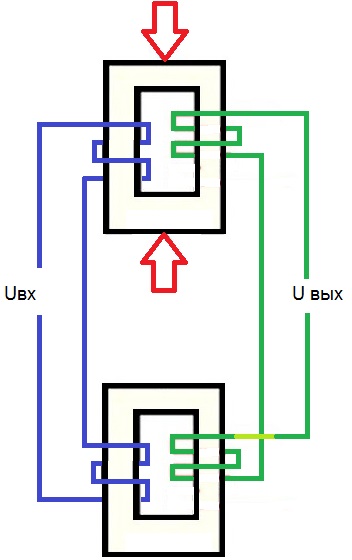
Følgende generelle ordning gælder for kompensation. En lukket magnetostriktiv magnetisk kerne lavet af nikkel-zink ferrit udsættes for en målbar kraft. En sådan kerne oplever ikke krafttryk, men viklingerne af de to ledninger er forbundet med hinanden, så der sker en ændring i den samlede EMF.
Primærviklingerne er identiske og serieforbundne, de drives af vekselstrøm med en frekvens inden for ti kilohertz, mens sekundærviklingerne (også de samme) tændes modsat, og i fravær af en deformerende kraft er den samlede EMF 0. Hvis trykket på den første kerne steg, er den samlede EMF ved udgangen ikke-nul og proportional med deformationen.