Statiske belastninger på motorer af hovedkranmekanismer
Kraften og drejningsmomentet for kranhejsens motoraksel i statisk løft af lasten kan beregnes ved hjælp af formlerne
hvor P er motorens akseleffekt, kW; G er den kraft, der kræves for at løfte byrden, N; G0 — gribeanordningens løftekraft, N; M er motorakselmomentet, Nm; v er hastigheden for at løfte lasten, m/s; D er diameteren af slæbespiltromlen, m; η — løftemekanismens effektivitet; i er gearkassens og kædetaljens udvekslingsforhold.
I nedstigningstilstanden udvikler kranmotoren effekt svarende til forskellen mellem friktionskraften Ptr og kraften på grund af virkningen af vægten af den faldende last Pgr:
Ved sænkning af middel og tung belastning ledes energi fra gearakslen til motoren, fordi Pgr >> Ptr (bremseudløsning). I dette tilfælde vil motorens akseleffekt, kW, blive udtrykt ved formlen

Ved sænkning af lette læs eller en tom krog kan der være tilfælde, hvor Pgr < Ptr.I dette tilfælde arbejder motoren med et bevægelsesmoment (power decent) og udvikler effekt, kW,

Ud fra de givne formler er det muligt at bestemme kraften af kranmotoren ved enhver belastning på krogen. Ved beregning skal det huskes, at effektiviteten af mekanismen afhænger af dens belastning (fig. 1).
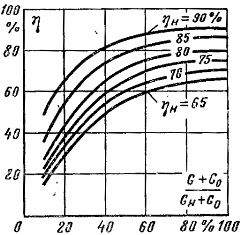
Ris. 1. Afhængighed af mekanismens effektivitet på belastningen.
Kraften og drejningsmomentet på akslen af motorerne af de horisontale mekanismer for kranens bevægelse i statisk driftstilstand kan bestemmes af formlerne

hvor P er motorakseleffekten af kranbevægelsesmekanismen, kW; M er bevægelsesmekanismens motorakselmoment, Nm; G — vægt af transporteret last, N; G1 — egenvægt af bevægelsesmekanismen, N; v — bevægelseshastighed, m/s; R er radius af hjulet, m; r er radius af hjulakslens hals, m; μ — glidefriktionskoefficient (μ = 0,08-0,12); f — rullefriktionskoefficient, m (f = 0,0005 — 0,001 m); η — effektiviteten af bevægelsesmekanismen; k — koefficient, der tager højde for friktionen af hjulflangerne på skinnerne; i — Gearforholdet for undervognsreduktionen.
I en række løfte- og transportmekanismer sker bevægelsen ikke i vandret retning. Effekten af vindbelastning osv. er også mulig. Formlen til at bestemme magten i dette tilfælde kan repræsenteres som

Yderligere markeret: α — hældningsvinklen af styrene i forhold til det vandrette plan; F — specifik vindbelastning, N/m2; S er det område, som vindtrykket virker på i en vinkel på 90 °, m2.
I den sidste formel karakteriserer det første led den motorakseleffekt, der kræves for at overvinde friktion under vandret bevægelse; det andet led svarer til løftekraften, det tredje er kraftkomponenten fra vindbelastningen.
En række kraner har en drejeskive, hvorpå arbejdsudstyret er placeret. Bevægelsen af platformen overføres gennem et tandhjul (drejeskive) med en diameter Dkp monteret på det. Mellem platformen og den faste base er der ruller (ruller) med en diameter på dp. I dette tilfælde findes kraften og drejningsmomentet af kranmotoren på grund af friktionskræfter på samme måde som tilfældet med frem- og tilbagegående bevægelse, nemlig:

Her, ud over de kendte værdier: G2 er vægten af pladespilleren med alt udstyr på, N; ωl — vinkelhastighed, platforme, rad/sek; i — gearforhold mellem svingmekanismens gearkasse og transmissionens drivgear — drejeskive.

Ved bestemmelse af kraften af kranens elektriske drev er det i nogle tilfælde nødvendigt at tage højde for ændringen i belastningen, når du arbejder på en skråning. Vindbelastningen på de roterende mekanismer bestemmes ved at tage højde for forskellen i de vindkræfter, der virker på lasten, kranbommen og kontravægten.
Ved design af elektriske drev til kranmekanismer, ved slutningen af motorvalget, kontrolleres det elektriske drev for tilladte accelerationsværdier, for hvilke data er angivet i tabel 1
Tabel 1 Navn på mekanismerne og deres formål
Mekanismernes navn og deres formål Acceleration, m/s2 Løftemekanismer beregnet til løft af flydende metaller, skrøbelige genstande, produkter, forskellige monteringsarbejder 0,1 Løftemekanismer for montageparker og metallurgiske værksteder 0,2 — 0,5 Løftemekanismer for gribekraner 0,8 Mekanismer bevægelse af kraner beregnet til præcisionsmontagearbejde og transport af flydende metaller, skrøbelige genstande 0,1 - 0,2 Bevægelsesmekanismer med tyngdekraftens tiltrækningskraft ved fuld 0,2 - 0,7 Fuldgreb kranvogne 0,8 - 1,4 Krandreje 0,5 - 1,2