Frekvensomformer - typer, driftsprincip, tilslutningsskemaer
 Rotoren på enhver elektrisk motor drives af kræfter forårsaget af et roterende elektromagnetisk felt inde i statorviklingen. Dens hastighed bestemmes normalt af elnettets industrielle frekvens.
Rotoren på enhver elektrisk motor drives af kræfter forårsaget af et roterende elektromagnetisk felt inde i statorviklingen. Dens hastighed bestemmes normalt af elnettets industrielle frekvens.
Dens standardværdi på 50 hertz indebærer halvtreds oscillationsperioder på et sekund. På et minut stiger deres antal 60 gange og er 50×60 = 3000 omdrejninger. Rotoren roterer det samme antal gange under påvirkning af det påførte elektromagnetiske felt.
Hvis du ændrer værdien af netfrekvensen på statoren, kan du justere rotationshastigheden for rotoren og det drev, der er tilsluttet den. Dette princip er grundlaget for styringen af elektriske motorer.
Typer af frekvensomformere
Ved design er frekvensomformere:
1. induktionstype;
2. elektronisk.
Fremstillede asynkronmotorer i henhold til skemaet med en faserotor og startet i generatortilstand, er repræsentanter for den første type. Under drift har de lav effektivitet og er kendetegnet ved lav effektivitet.Derfor har de ikke fundet bred anvendelse i produktionen og bruges ekstremt sjældent.
Den elektroniske frekvenskonverteringsmetode tillader jævn hastighedsregulering af både asynkrone og synkrone maskiner. I dette tilfælde kan et af to kontrolprincipper anvendes:
1. Ifølge en forudbestemt karakteristik af rotationshastighedens afhængighed af frekvensen (V/f);
2. vektorkontrolmetode.
Den første metode er den enkleste og mindre perfekte, og den anden bruges til præcist at kontrollere omdrejningshastighederne for kritisk industrielt udstyr.
Funktioner ved frekvensomdannelsesvektorkontrol
Forskellen mellem denne metode er interaktionen, påvirkningen af konverterstyreenheden på «rumvektoren» af den magnetiske flux, der roterer med rotorfeltets frekvens.
Algoritmer for konvertere til at arbejde efter dette princip er skabt på to måder:
1. sensorløs kontrol;
2. flowregulering.
Den første metode er baseret på at bestemme en vis afhængighed af vekslen af sekvenser pulsbreddemodulation (PWM) inverter til forudindstillede algoritmer. I dette tilfælde styres amplituden og frekvensen af konverterens udgangsspænding af slipstrøm og belastning, men uden brug af rotorhastighedsfeedback.
Denne metode bruges ved styring af flere elektriske motorer forbundet parallelt med frekvensomformeren.Fluxstyring involverer overvågning af driftsstrømmene inde i motoren med deres nedbrydning til aktive og reaktive komponenter og foretager justeringer af konverterens drift for at indstille amplituden, frekvensen og vinklen for udgangsspændingsvektorerne.
Dette forbedrer motorens nøjagtighed og øger grænserne for dens justering. Brugen af flowkontrol udvider mulighederne for drev, der arbejder ved lave hastigheder med høje dynamiske belastninger, såsom kranhejse eller industrielle viklemaskiner.
Brugen af vektorteknologi gør det muligt at implementere dynamisk momentstyring trefasede asynkronmotorer.
Tilsvarende kredsløb
Et grundlæggende forenklet elektrisk kredsløb af en induktionsmotor kan repræsenteres som følger.
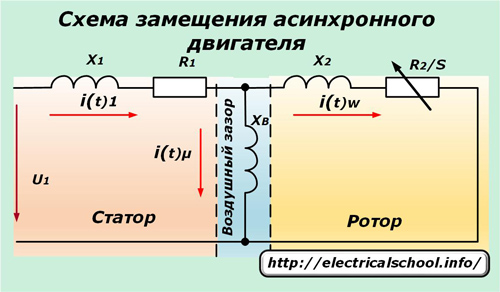
En spænding u1 tilføres statorviklingerne, som har en aktiv modstand R1 og en induktiv modstand X1. Den, der overvinder modstanden af luftgabet Xv, omdannes til rotorviklingen, hvilket forårsager en strøm i den, der overvinder dens modstand.
Ækvivalent kredsløb for et vektorkredsløb
Dens konstruktion hjælper med at forstå de processer, der finder sted i induktionsmotoren.

Statorstrømmens energi er opdelt i to dele:
-
iµ — flowdannende skillevæg;
-
iw — momentgenererende komponent.
I dette tilfælde har rotoren en skridafhængig aktiv modstand R2/s.
For sensorløs styring måles følgende:
-
spænding u1;
-
nuværende i1.
I henhold til deres værdier beregner de:
-
iµ — strømningskomponent, der danner strømmen;
-
iw — værdigenererende drejningsmoment.
Beregningsalgoritmen omfatter nu et elektronisk ækvivalent kredsløb af en induktionsmotor med strømregulatorer, som tager højde for mætningsforholdene for det elektromagnetiske felt og tabene af magnetisk energi i stål.
Begge komponenter af strømvektorerne, forskellige i vinkel og amplitude, roterer sammen med rotorkoordinatsystemet og bliver til et stationært statororienteringssystem.
Ifølge dette princip justeres parametrene for frekvensomformeren i henhold til belastningen af induktionsmotoren.
Princippet for drift af frekvensomformeren
Denne enhed, som også kaldes en inverter, er baseret på en dobbelt ændring i bølgeformen på netstrømforsyningen.
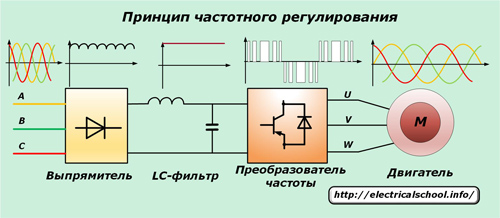
Indledningsvis føres industriel spænding til en ensretter med kraftige dioder, der fjerner sinusformede harmoniske, men efterlader signalet krusninger. Til deres fjernelse er der tilvejebragt en kondensatorbank med en induktans (LC-filter), som giver en stabil, udjævnet form til den ensrettede spænding.
Signalet går derefter til indgangen på frekvensomformeren, som er et trefaset brokredsløb på seks krafttransistorer IGBT- eller MOSFET-serien med omvendt polaritets spændingsbeskyttelsesdioder. Tidligere anvendte tyristorer til disse formål har ikke tilstrækkelig hastighed og fungerer med store forstyrrelser.
For at tænde for motorens "bremse"-tilstand kan en styret transistor med en kraftig modstand, der spreder energi, installeres i kredsløbet. Denne teknik gør det muligt at fjerne den spænding, der genereres af motoren, for at beskytte filterkondensatorerne mod overopladning og beskadigelse.
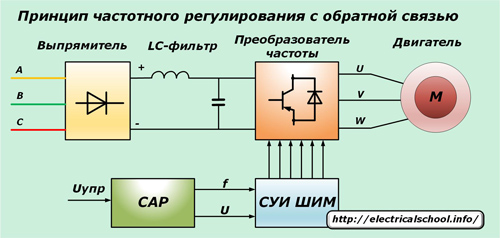
Vektorfrekvensstyringsmetoden for konverteren giver dig mulighed for at oprette kredsløb, der udfører automatisk kontrol af signalet fra ACS-systemer. Et ledelsessystem bruges til dette:
1. amplitude;
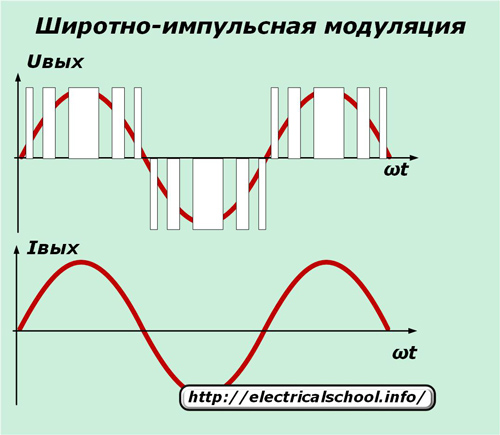
2. PWM (impulsbreddesimulering).
Amplitudekontrolmetoden er baseret på ændring af indgangsspændingen, og PWM er baseret på algoritmen til at skifte effekttransistorerne ved en konstant indgangsspænding.
Med PWM-regulering skabes en periode med signalmodulation, når statorviklingen er forbundet i streng rækkefølge til de positive og negative terminaler på ensretteren.
Da generatorens clockfrekvens er ret høj, udjævnes de i viklingen af den elektriske motor, som har induktiv modstand, til en normal sinusbølge.
PWM-styringsmetoder maksimerer elimineringen af energitab og giver høj konverteringseffektivitet på grund af den samtidige kontrol af frekvens og amplitude. De er blevet tilgængelige på grund af udviklingen af GTO-seriens strømlåste tyristorstyringsteknologier eller bipolære mærker af IGBT-transistorer med isoleret port.
Principperne for deres inklusion til styring af en trefaset motor er vist på billedet.
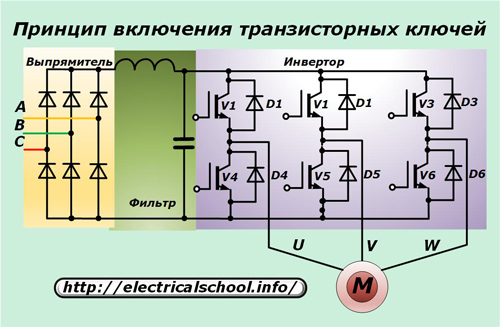
Hver af de seks IGBT'er er forbundet i antiparallel kredsløb til sin egen omvendte strømdiode. I dette tilfælde passerer den aktive strøm af induktionsmotoren gennem strømkredsløbet for hver transistor, og dens reaktive komponent ledes gennem dioderne.
For at eliminere påvirkningen af ekstern elektrisk støj på driften af inverteren og motoren kan frekvensomformerens kredsløb bl.a. støjreduktionsfilterlikvidation:
-
radiointerferens;
-
elektriske udladninger forårsaget af driftsudstyr.
Disse signaleres af controlleren, og der bruges skærmede ledninger mellem motoren og inverterens udgangsterminaler for at reducere stød.
For at forbedre nøjagtigheden af driften af asynkronmotorer inkluderer styrekredsløbet af frekvensomformere:
-
kommunikationsinput med avancerede grænsefladefunktioner;
-
indbygget controller;
-
hukommelseskort;
-
software;
-
informativt LED-display, der viser de vigtigste outputparametre;
-
bremsechopper og indbygget EMC-filter;
-
kredsløbskølesystem baseret på blæser med fans af øget ressource;
-
funktionen med at opvarme motoren med jævnstrøm og nogle andre muligheder.
Driftsdiagrammer
Frekvensomformere er designet til at fungere med enkeltfasede eller trefasede netværk. Men hvis der er industrielle kilder til jævnstrøm med en spænding på 220 volt, kan invertere strømforsynes fra dem.

Trefasede modeller er designet til netspænding 380 volt og tilfører den til elmotoren. Enfasede invertere drives af 220 volt og udsender tre faser fordelt over tid.
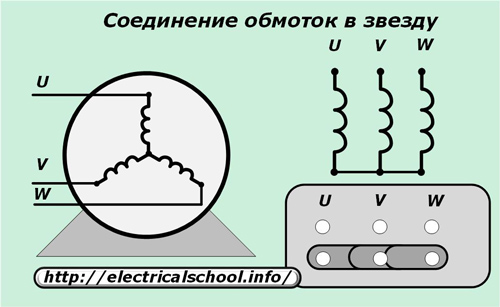
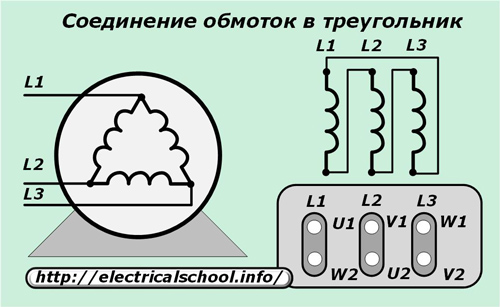
Tilslutningsskemaet for frekvensomformeren til motoren kan udføres i henhold til skemaerne:
-
stjerner;
-
trekant.
Motorens viklinger er samlet i en «stjerne» til konverteren, der forsynes af et trefaset netværk på 380 volt.
I henhold til "delta"-skemaet samles motorviklingerne, når strømomformeren er forbundet til et enfaset 220 volt netværk.
Når du vælger en metode til at forbinde en elektrisk motor til en frekvensomformer, skal du være opmærksom på det effektforhold, som en kørende motor kan skabe i alle tilstande, inklusive en langsom, belastet start, med inverterens muligheder.
Det er umuligt konstant at overbelaste frekvensomformeren, og en lille reserve af dens udgangseffekt vil sikre dens langsigtede og problemfri drift.