Udvalg af elmotorer til udstyr med forskellige typer belastning og driftstilstande
 Det korrekte valg af elektriske motorer til produktionsmekanismer sikrer deres kontinuerlige og pålidelige drift gennem hele standardlevetiden. Dette er en meget vigtig proces, hvor mange forskellige faktorer og kriterier skal tages i betragtning. En af de vigtigste faktorer er hensynet til belastningens art og type.
Det korrekte valg af elektriske motorer til produktionsmekanismer sikrer deres kontinuerlige og pålidelige drift gennem hele standardlevetiden. Dette er en meget vigtig proces, hvor mange forskellige faktorer og kriterier skal tages i betragtning. En af de vigtigste faktorer er hensynet til belastningens art og type.
Her er alle de kriterier, du skal overveje, når du vælger: Sådan vælger du den rigtige elmotor
Når du vælger elektriske motorer til forskellige maskiner, installationer og maskiner, er det nødvendigt at tage højde for de forskellige typer belastning, typen af mekaniske egenskaber, arten og varigheden af disse mekanismers arbejdscyklusser.
Ved at vide, hvordan belastningen på akslen af den valgte elektriske motor vil ændre sig, er det muligt nøjagtigt at bestemme, hvordan effekttabene vil ændre sig under drift, og takket være dette skal du vælge en elektrisk motor, der, der arbejder ved en given belastning, ikke vil overophedes . Den maksimale opvarmningstemperatur for isoleringen af den elektriske motor vil ikke overstige den tilladte værdi under hele arbejdscyklussen.
Forkert valg af elektriske motorer af produktionsmekanismer fører til afbrydelse af produktionsprocesser og fører til tab af fremstillede produkter og yderligere elomkostninger.
Elektrisk udstyr med elektriske motorer skal fuldt ud opfylde kravene i den teknologiske proces.
Valget af en af katalogtyperne af elektriske motorer anses for korrekt, hvis følgende betingelser er opfyldt:
-
den mest komplette korrespondance mellem den elektriske motor og arbejdsmaskinen (drivmekanisme) med hensyn til mekaniske egenskaber. Det betyder, at den elektriske motor skal have en sådan mekanisk karakteristik, at den kan forsyne drevet med de nødvendige værdier af hastighed og acceleration i en stationær og transient tilstand;
-
maksimal udnyttelse af elmotoreffekt i alle driftstilstande. Temperaturen på alle aktive dele af den elektriske motor i de mest alvorlige driftstilstande skal være så tæt som muligt på den tilladte opvarmningstemperatur, men ikke overstige den;
-
kompatibilitet af den elektriske motor med drevet og miljømæssige forhold med hensyn til design;
-
overensstemmelse af den elektriske motor med parametrene for strømforsyningen.
For at vælge en elektrisk motor kræves følgende data:
-
type og navn på drivmekanismen;
-
maksimal akseleffekt, hvis driftstilstanden er kontinuerlig, og belastningen er konstant, og i andre tilfælde grafer over ændringer i kraft eller modstandsmoment for akslen som funktion af tiden;
-
rotationsfrekvens (eller rotationsfrekvensområde) af drivakslen;
-
metode til artikulation af drivmekanismen med elmotorens aksel (i nærvær af kinematiske transmissioner er transmissionstypen og gearforholdet angivet);
-
mængden af startmoment, som den elektriske motor skal levere til drivakslen;
-
hastighedsreguleringsgrænser (øvre og nedre værdier og tilsvarende effekt- og drejningsmomentværdier);
-
krævet kvalitet (jævnhed, graduering) af hastighedskontrol;
-
hyppigheden af aktivering af drevet inden for en time;
-
det ydre miljøs karakteristika.
Valget af en elektrisk motor baseret på hensyntagen til alle forhold og nominelle data udføres i henhold til kataloger.

De mulige driftsformer for elektriske drev er kendetegnet ved en stor variation med hensyn til arten og varigheden af cyklusser, belastningsværdier, køleforhold, forholdet mellem starttab og jævn drift osv., derfor produktionen af elektriske motorer for hver af de mulige driftsformer for et elektrisk drev giver ingen praktisk mening.
Baseret på analysen af virkelige tilstande identificeres en særlig klasse af tilstande - nominelle tilstande, for hvilke seriemotorer er designet og fremstillet.
Dataene i passet til en elektrisk maskine refererer til en bestemt nominel tilstand og kaldes de nominelle data for en elektrisk maskine.
Producenter garanterer, at når elmotoren kører i nominel tilstand ved nominel belastning, udnyttes den fuldt ud termisk.
Den nuværende GOST giver 8 nominelle tilstande, som i overensstemmelse med den internationale klassifikation har symbolerne S1 - S8.
Kontinuerlig drift S1 — drift af maskinen ved konstant belastning i lang nok tid til at opnå en konstant temperatur på alle dens dele.
Kortvarig drift S2 — drift af maskinen ved konstant belastning i en tid, der er utilstrækkelig til, at alle dele af maskinen kan nå den indstillede temperatur, efterfulgt af standsning af maskinen i tilstrækkelig tid til at afkøle maskinen til en temperatur på højst 2 °C fra den omgivende temperatur. Ved kortvarigt arbejde er arbejdsperiodens varighed 15, 30, 60, 90 minutter.
Intermitterende drift S3 — en sekvens af identiske driftscyklusser, som hver omfatter tiden med kontinuerlig belastningsdrift, hvor maskinen ikke varmes op til den indstillede temperatur, og parkeringstiden, hvor maskinen ikke afkøles til den omgivende temperatur.
I denne tilstand er arbejdscyklussen sådan, at startstrømmen ikke påvirker temperaturstigningen væsentligt. Cyklustiden er utilstrækkelig til at opnå termisk ligevægt og overstiger ikke 10 minutter. Tilstanden er karakteriseret ved værdien af varigheden af inklusion i procenter:
Motorer produceret af industrien til denne driftsform er karakteriseret ved en driftscyklus (PV), som er defineret ved varigheden af en driftscyklus
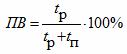
hvor tp er motorens køretid; tp — pausetid.
Standardiserede værdier for varigheden af inklusion: 15, 25, 40, 60% eller relative værdier af varigheden af arbejdsperioden: 0,15; 0,25; 0,40; 0,60. For S3-tilstand svarer de nominelle data kun til en bestemt driftscyklus og refererer til driftsperioden.
Modus S1 - S3 er i øjeblikket de vigtigste, for hvilke de nominelle data er inkluderet af de lokale elbilfabrikker i maskinens kataloger og pas.
Læs mere om det her: Driftsformer for elektriske motorer
For et fornuftigt motorvalg med hensyn til effekt er det nødvendigt at vide, hvordan motorakselbelastningen ændrer sig over tid, hvilket igen gør det muligt at vurdere arten af ændringen i effekttab.
Derudover er det nødvendigt at fastslå, hvordan processen med at opvarme motoren forløber som følge af frigivelsen af energitab i den. Denne tilgang giver dig mulighed for at vælge motoren på en sådan måde, at den maksimale temperatur på viklingsisoleringen ikke overstiger den tilladte værdi. Denne betingelse er en af de vigtigste for at sikre pålidelig drift af motoren i hele dens levetid.
Valget af elmotorens effekt skal foretages i overensstemmelse med arten af belastningerne på arbejdsmaskinen. Denne karakter vurderes på to grunde:
-
i henhold til den nominelle driftsform;
-
gennem ændringer i mængden af forbrugt energi.
Motorkraft skal opfylde tre betingelser:
-
normal opvarmning under drift;
-
tilstrækkelig overbelastningskapacitet;
-
tilstrækkeligt startmoment.
Valget af elektriske motorer med den såkaldte"Power reserve", baseret på den størst mulige belastning i henhold til tidsplanen, fører til underudnyttelse af elmotoren, og derfor til øgede kapitalomkostninger og driftsomkostninger på grund af reducerede effektfaktorer og effektivitet. Overdreven stigning i motoreffekt kan også føre til ryk under acceleration.
Hvis elmotoren skal arbejde i lang tid med en konstant eller let skiftende belastning, er det ikke svært at bestemme dens effekt og udføres i overensstemmelse med formlerne. Det er meget sværere at vælge kraften til elektriske motorer i andre driftsformer.

Den kortvarige belastning er kendetegnet ved, at inklusionsperioderne er korte, og pauserne er tilstrækkelige til fuldstændig afkøling af elmotoren. I dette tilfælde antages det, at belastningen på elmotoren i koblingsperioderne forbliver konstant eller næsten konstant.
For at elmotoren skal bruges korrekt til opvarmning i denne tilstand, er det nødvendigt at vælge den, så dens kontinuerlige effekt (angivet i katalogerne) er mindre end den effekt, der svarer til den kortvarige belastning, dvs. den elektriske motor har en termisk overbelastning i perioder med dens kortvarige drift...
Hvis driftsperioderne for den elektriske motor er væsentligt mindre end den tid, der kræves til dens fuldstændige opvarmning, men pauserne mellem perioderne med tænding er væsentligt kortere end tiden for fuldstændig afkøling, så er der gentagen kortvarig belastning.
Effektberegning og motorvalg til kontinuerlig drift
Ved konstant eller let varierende akselbelastning bør motoreffekten kun lidt overstige belastningseffekten.I dette tilfælde skal betingelsen være opfyldt
Pn ≥ P,
hvor Pn er den nominelle motoreffekt; P — belastningseffekt. At vælge en motor kommer ned til at vælge den fra kataloget.
Valg af motoreffekt til kontinuerlig drift. Hvis drejningsmomentet og kraften i produktionsmekanismen ikke ændres, skal der vælges en motor med en nominel effekt Pn svarende til belastningens effekt under hensyntagen til tab i transmissionen (gearkasse):
Pn ≥ Pm/ηt, W
hvor ηt er transmissions (gearkasse) effektivitet.
Ved et givet modstandsmoment for drivmekanismen Ms, N ∙ m og rotationsfrekvensen af gearkassens udgangsaksel n2, rpm
Pm = Mc ∙ ω2, W
hvor ω2 = 2π ∙ n2 / 60, rad / s
For nogle produktionsmekanismer, der opererer i en kontinuerlig tilstand med et konstant moment af akselmodstand, er der omtrentlige formler til bestemmelse af motorers kraft.
Effektberegning og motorvalg til korttidsbelastning
Motorer til kortvarig drift af det elektriske drev vælges i henhold til deres nominelle effekt, som skal være lig med belastningseffekten under hensyntagen til driftens varighed. Standard tilladte værdier for motorer produceret af industrien til kortvarig drift er 10, 30, 60, 90 minutter.
I mangel af intermitterende driftsmotorer kan intermitterende driftsmotorer installeres. I dette tilfælde svarer en driftstid på 30 minutter til duty cycle = 15 %, 60 minutter svarer til duty cycle = 25 %, og 90 minutter svarer til duty cycle = 40 %.Som sidste udvej er det muligt at anvende motorer til kontinuerlig drift med Pn < P og deres efterfølgende kontrol for termiske forhold.
Effektberegning og motorvalg for intermitterende belastning
For et elektrisk drev, der arbejder i intermitterende tilstand, beregnes motoreffekten ved hjælp af metoden med gennemsnitstab eller tilsvarende værdier. Den første metode er mere nøjagtig, men mere arbejdskrævende. Det er mere bekvemt at bruge metoden med ækvivalente værdier. Afhængigt af den givne belastningsplan P = f (t), M = f (t), I = f (t), bestemmes middelkvadratværdierne, som er kaldes tilsvarende.
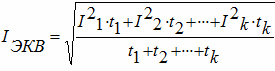
Ækvivalent effekt er RMS-effekten af belastningsdiagrammet
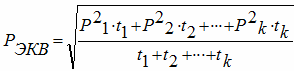
hvor t1, t2, …, tk — tidsintervaller, hvor belastningseffekten er lig med henholdsvis P1, P2, …, Pk.
Ifølge kataloget, for de opnåede værdier af Reqv og PV, vælges motorens mærkeeffekt fra betingelsen Pn ≥ REKV.
Hvis diagrammet M = f (t) er givet, så er det ækvivalente moment
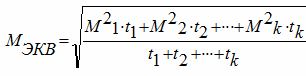
og den ækvivalente effekt ved hastighed n er givet af udtrykket
Req = Meq • n / 9550 (kW).
Hvis diagrammet I = f (t) er givet, er strømmen af varmeækvivalenten
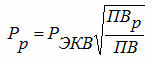
Den beregnede værdi af PVr afviger ofte fra standardværdierne, derfor afrundes enten den opnåede værdi af PVr til nærmeste standardværdi, eller den ækvivalente effekt genberegnes ved hjælp af formlen
Under drift observeres kortvarige overbelastninger, der overstiger motorens nominelle effekt. De påvirker ikke motorernes opvarmning væsentligt, men kan føre til forkert drift eller standsning. Derfor bør motoren kontrolleres for overbelastningskapacitet i henhold til udtrykket
Pm / Pn = ku ∙ Mm / Mn,
hvor Pm er den højeste effekt i belastningsdiagrammet; Mm / Mn — multiplum af det maksimale drejningsmoment bestemmes af kataloget; koefficient ku = 0,8 tager højde for det mulige spændingsfald i netværket.
Hvis denne betingelse ikke er opfyldt, skal en motor med højere effekt vælges fra kataloget og igen kontrolleres for overbelastningskapacitet.
Se også om dette emne: Valg af motor til intermitterende drift

Industrien producerer en række serier af intermitterende belastningsmotorer:
-
asynkrone kraner med egernrotor i MTKF-serien og med faserotor i MTF-serien;
-
lignende metallurgiske serier MTKN og MTN;
-
DC serie D.
Maskinerne i den specificerede serie er kendetegnet ved formen af en langstrakt rotor (anker), som giver en reduktion af inertimomentet. For at reducere tabene, der frigives i statorviklingen under transienter, har motorer i serierne MTKF og MTKN en øget nominel slip snom = 7 ÷ 12%. Overbelastningskapaciteten for motorerne i kran- og metallurgiske serier er 2,3 — 3 ved duty cycle = 40%, hvilket ved duty cycle = 100% svarer til λ = Mcr / Mnom100 = 4,4-5,5.