Generatorsystem — DC-motor
 Forskellige værktøjsmaskiner kræver ofte trinløs styring af kørehastigheden over et bredere område, end der kan opnås ved at justere den magnetiske flux. DC-motor med parallel excitation… I disse tilfælde anvendes mere komplekse elektriske drivsystemer.
Forskellige værktøjsmaskiner kræver ofte trinløs styring af kørehastigheden over et bredere område, end der kan opnås ved at justere den magnetiske flux. DC-motor med parallel excitation… I disse tilfælde anvendes mere komplekse elektriske drivsystemer.
I fig. 1 viser et diagram over et justerbart elektrisk drev ifølge et generator-motorsystem (forkortet G — D). I dette system roterer en induktionsmotor IM kontinuerligt en uafhængigt exciteret DC-generator G og en exciter B, som er en parallel-exciteret laveffekt DC-generator.
DC-motoren D driver maskinens arbejdslegeme. Generatorens OVG's og motorens ATS's magnetiseringsviklinger forsynes af magnetiseringsanordningen B. Ved at ændre modstanden af magnetiseringskredsløbet i generatoren G ved hjælp af reostat 1, ændres spændingen på motorens D anker, og dermed motorens hastighed reguleres. I dette tilfælde kører motoren med fuld og konstant flux, fordi reostat 2 er fjernet.
Når spændingen U ændres, ændres hastigheden n0 ideel motor tomgangshastighed D. Da motorfluxen og dens ankerkredsløbsmodstand ikke ændres, forbliver hældningen b konstant. Derfor er de retlinede mekaniske egenskaber svarende til forskellige værdier af U placeret under hinanden og parallelt med hinanden (fig. 2).
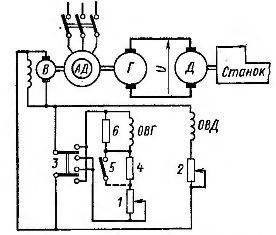
Ris. 1. Systemgenerator - DC-motor (dpt)
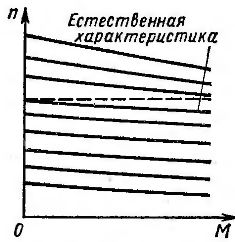
Ris. 2. Generatorens mekaniske egenskaber — DC-motorsystem
De har en større hældning end egenskaberne for den samme elektriske motor, der fødes fra det konstante netværk, da spændingen U i G - D-systemet ved en konstant excitationsstrøm af generatoren falder med stigende belastning i henhold til afhængigheden:
hvor f.eks. og rg — e, henholdsvis. etc. s. og generatorens indre modstand.
I analogi med asynkrone motorer betegner vi
Denne værdi karakteriserer faldet i motorhastigheden, når belastningen stiger fra nul til nominel. Til parallelle mekaniske egenskaber
Denne værdi stiger, når n0 falder. Ved store værdier af sn vil de specificerede skæreforhold ændre sig væsentligt med tilfældige belastningsudsving. Derfor er spændingsreguleringsområdet normalt mindre end 5:1.
Efterhånden som motorernes mærkeeffekt falder, stiger spændingsfaldet over motorerne, og de mekaniske karakteristika bliver stejlere. Af denne grund reduceres spændingsreguleringsområdet for G -D-systemet, efterhånden som effekten falder (for effekter mindre end 1 kW til 3:1 eller 2:1).
Efterhånden som generatorens magnetiske flux falder, påvirker dens ankerreaktions afmagnetiseringseffekt dens spænding i højere grad. Derfor har de egenskaber, der er forbundet med lave motorhastigheder, faktisk en større hældning end de mekaniske egenskaber.
Udvidelsen af kontrolområdet opnås ved at reducere den magnetiske flux af motoren D ved hjælp af rheostat 2 (se fig. 1), der produceres ved generatorens fulde flow. Denne metode til hastighedsregulering svarer til karakteristika placeret over den naturlige en (se fig. 2).
Det samlede kontrolområde, svarende til produktet af kontrolområderne for begge metoder, når (10 — 15): 1. Spændingsregulering er konstant drejningsmomentkontrol (da motorens magnetiske flux forbliver uændret). Regulering ved at ændre den magnetiske flux af motoren D er en konstant effektregulering.
Før motoren startes, fjernes D rheostat 2 (se fig. 1) helt, og motorfluxen når den højeste værdi. Så øger reostaten 1 excitationen af generatoren G. Dette får spændingen til at stige og motorens D hastighed til at øges. Hvis spolen OVG er forbundet med det samme til den fulde spænding UB af exciteren B, vil strømmen i den, som i ethvert kredsløb med induktans og aktiv modstand, stige:
hvor rv er modstanden af excitationsspolen, LB er dens induktans (se bort fra effekten af mætning af det magnetiske kredsløb).
I fig. 3 viser a (kurve 1) en graf over excitationsstrømmens afhængighed af tiden. Excitationsstrømmen stiger gradvist; stigningstakten bestemmes af forholdet

hvor Tv er den elektromagnetiske tidskonstant for generatorens excitationsvikling; det har tidsdimensionen.
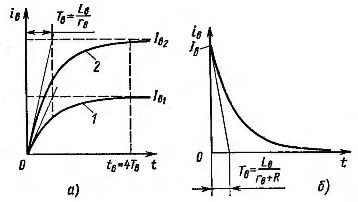
Ris. 3. Ændring af excitationsstrømmen i G-D systemet
Ændringen i generatorspændingen ved opstart har omtrent samme karakter som ændringen i magnetiseringsstrømmen. Dette gør det muligt for motoren at starte automatisk med reostat 1 fjernet (se fig. 1).
Stigningen i generatorens excitationsstrøm accelereres (tvinges) ofte ved i det indledende øjeblik at påføre en spænding på excitationsviklingen, der overstiger den nominelle. Derefter vil processen med at øge excitationen fortsætte langs kurve 2 (se fig. 3, en ). Når strømmen i spolen når Iv1, svarende til steady-state excitationsstrømmen ved den nominelle spænding, reduceres excitationsspolens spænding til den nominelle. Stigetiden for excitationsstrømmen til den nominelle reduceres.
For at tvinge exciteringen af generatoren vælges magnetiseringsspændingen V (se fig. 1) 2-3 gange højere end den nominelle spænding af generatorens excitationsspolen, og en ekstra modstand 4 indføres i kredsløbet. …
Generator-motor-systemet muliggør regenerativ bremsning. For at stoppe er det nødvendigt, at strømmen i armaturet ændrer retning. Drejningsmomentet vil også skifte fortegn, og i stedet for at køre, bliver det til at bremse. Standsning sker, når den magnetiske flux af motorreostat 2 stiger, eller når generatorspændingen falder med rheostat 1. I begge tilfælde, f.eks. etc. c. E på motoren bliver højere end spændingen U på generatoren.I dette tilfælde kører motor D i generatortilstand og drives i rotation af de bevægelige massers kinetiske energi, og generator G fungerer i motortilstand, hvorved IM-maskinen roterer med supersynkron hastighed, som samtidig skifter til generatortilstand og leverer strøm til netværket.
Regenerativ bremsning kan udføres uden at påvirke reostat 1 og 2. Du kan blot åbne generatorens excitationskredsløb (f.eks. kontakt 3). I dette tilfælde vil strømmen i et lukket kredsløb bestående af excitationsviklingen af generatoren og modstanden 6 gradvist falde
hvor R er modstanden af modstand 6.
Grafen svarende til denne ligning er vist i fig. 3, b. Et gradvist fald i generatorens excitationsstrøm svarer i dette tilfælde til en stigning i modstanden af rheostat 1 (se fig. 1) og forårsager regenerativ bremsning. I dette kredsløb er modstanden 6, der er forbundet parallelt med generatorens excitationsvikling, en udladningsmodstand. Det beskytter excitationsviklingens isolering mod beskadigelse i tilfælde af en pludselig nødafbrydelse af excitationskredsløbet.
Når excitationskredsløbet afbrydes, falder maskinens magnetiske flux kraftigt, inducerer e i magnetiseringsspolens drejninger. etc. c. selvinduktansen er så stor, at den kan få viklingsisoleringen til at bryde ned. Afladningsmodstanden 6 danner et kredsløb, hvori f.eks. etc. c. selvinduktionen af feltspolen inducerer en strøm, der bremser faldet i den magnetiske flux.
Spændingsfaldet over afladningsmodstanden er lig med spændingen over feltspolen.Jo lavere værdien af udladningsmodstanden er, jo lavere er spændingen af excitationsspolen, når kredsløbet er brudt. På samme tid, med et fald i udladningsmodstandens modstandsværdi, strømmer strømmen kontinuerligt gennem den i normal tilstand, og tabene i den stiger. Begge forhold skal tages i betragtning ved valg af afladningsmodstandsværdi.
Efter at generatorens excitationsvikling er slukket, forbliver en lille spænding ved dens terminaler på grund af resterende magnetisme. Dette kan få motoren til at rotere langsomt med det, der kaldes krybehastighed. For at eliminere dette fænomen er excitationsviklingen af generatoren, efter at være blevet afbrudt fra exciteren, forbundet til generatorens terminaler, således at spændingen fra den resterende magnetisme forårsager en afmagnetiseringsstrøm i excitationsviklingen af generatoren.
For at vende den elektriske motor D ændres retningen af strømmen i excitationsspolen til generatoren OVG G ved hjælp af kontakt 3 (eller en anden lignende enhed). På grund af spolens betydelige induktans falder excitationsstrømmen gradvist, ændrer retning og stiger derefter gradvist.
Processerne med at starte, stoppe og vende motoren i det betragtede system er meget økonomiske, da de udføres uden brug af reostater inkluderet i ankeret. Motoren startes og decelereres ved hjælp af let og kompakt udstyr, der kun styrer små feltstrømme. Derfor anbefales dette "generator - DC-motor"-system at blive brugt til arbejde med hyppige starter, bremser og vendinger.
De vigtigste ulemper ved motor-generator-DC-systemet er relativt lav effektivitet, høje omkostninger og besværlige på grund af tilstedeværelsen af et stort antal elektriske maskiner i systemet. Prisen på systemet overstiger prisen på en asynkron egern-burmotor med samme effekt 8 — 10 gange. Desuden sådan elektrisk drivsystem kræver meget plads.