Potentiometriske sensorer
En potentiometersensor er en variabel modstand, som en forsyningsspænding påføres, dens indgangsværdi er den lineære eller vinkelforskydning af den strømopsamlende kontakt, og udgangsværdien er den spænding, der tages af denne kontakt, som ændres i størrelse som dens position ændringer.
Potentiometriske sensorer er designet til at konvertere lineære eller vinkelforskydninger til et elektrisk signal, samt til at gengive de enkleste funktionelle afhængigheder i automatiske og automatiske enheder af en kontinuerlig type.
 Potentiometrisk sensortilslutningsdiagram
Potentiometrisk sensortilslutningsdiagram
Ved modstand er potentiometriske sensorer opdelt i
-
lameller med konstant modstand;
-
trådspole med kontinuerlig vikling;
-
med et resistivt lag.

Lamellære potentiometriske sensorer blev brugt til at udføre relativt grove målinger på grund af visse designfejl.
I sådanne sensorer er konstante modstande, valgt nominelt på en speciel måde, loddet til lamellerne.
Lamellen er en struktur med skiftende ledende og ikke-ledende elementer, hvorpå kollektorkontakten glider.Når strømkollektoren flyttes fra et ledende element til et andet, ændres den samlede modstand af modstandene forbundet til den med en mængde svarende til den nominelle værdi af en modstand. Ændringen i modstand kan forekomme over et bredt område. Målefejlen bestemmes af kontaktpudernes størrelse.
Lamelpotentiometersensor
Trådpotentiometersensorer er designet til mere nøjagtige målinger. Som regel er deres design en ramme lavet af getinax, textolite eller keramik, hvorpå en tynd ledning er viklet i et lag, drejer i en omgang, på den rensede overflade, hvoraf en strømopsamler glider.
Trådens diameter bestemmer nøjagtighedsklasse potentiometersensor (høj er 0,03-0,1 mm, lav er 0,1-0,4 mm). Trådmaterialer: manganin, fechral, legeringer baseret på ædle metaller. Slæberingen er lavet af et blødere materiale for at forhindre, at wiren gnaver.
Fordelene ved potentiometersensorer:
-
enkelhed af design;
-
lille størrelse og vægt;
-
høj grad af linearitet af statiske egenskaber;
-
stabilitet af egenskaber;
-
mulighed for drift på vekselstrøm og jævnstrøm.
Ulemper ved potentiometersensorer:
-
tilstedeværelsen af en glidende kontakt, som kan forårsage skade på grund af oxidation af kontaktsporet, gnidning af drejninger eller bøjning af skyderen;
-
fejl i drift på grund af belastning;
-
relativt lille konverteringsfaktor;
-
høj følsomhedstærskel;
-
tilstedeværelsen af støj;
-
modtagelighed for elektrisk erosion under påvirkning af impulsudladninger.

Statisk karakteristik af potentiometriske sensorer
Statisk karakteristik af en irreversibel potentiometrisk sensor
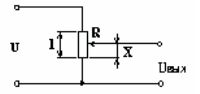
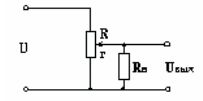
Lad os som et eksempel betragte en potentiometersensor med en kontinuerlig spole. Potentiometerets klemmer påføres en AC- eller DC-spænding U. Indgangsværdien er forskydningen X, udgangsværdien er spændingen Uout. For inaktiv tilstand er sensorens statiske karakteristik lineær, fordi forholdet er sandt: Uout = (U / R) r,
hvor R er spolemodstanden; r er modstanden af en del af spolen.
Givet at r / R = x / l, hvor l er den samlede længde af spolen, får vi Uout = (U / l) x = Kx [V / m],
hvor K er omdannelseskoefficienten (transmission) for sensoren.
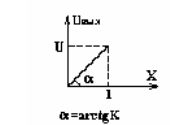
Det er klart, at en sådan sensor ikke vil reagere på en ændring i indgangssignalets fortegn (sensoren er irreversibel). Der er ordninger, der er følsomme over for ændringer i underskrifter. Den statiske karakteristik af en sådan sensor har formen vist på figuren.
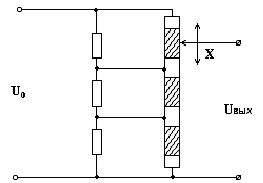
Reversibelt kredsløb af en potentiometersensor
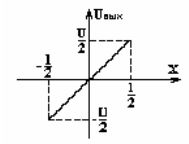
Statisk karakteristik af en reversibel potentiometrisk sensor
De resulterende ideelle egenskaber kan afvige væsentligt fra de virkelige på grund af tilstedeværelsen af forskellige typer fejl:
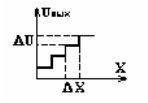
1. Død zone.
Udgangsspændingen varierer diskret fra tur til sving, dvs. denne zone opstår, når Uout ikke ændres for en lille inputværdi.
Størrelsen af spændingsspringet bestemmes af formlen: DU = U / W, hvor W er antallet af omdrejninger.
Følsomhedstærsklen bestemmes af diameteren af spoleledningen: Dx = l / W.
Potentiometrisk sensor til dødt bånd
2. Uregelmæssighed af statiske egenskaber på grund af variation i tråddiameter, modstand og viklingsstigning.
3. En fejl fra slør, der opstod mellem motorens rotationsakse og styremuffen (trykfjedre bruges til at reducere det).
4.Fejl på grund af friktion.
Ved lav effekt af elementet, der driver potentiometersensorens børste, kan der opstå en stagnationszone på grund af friktion.
Børstetrykket skal justeres omhyggeligt.
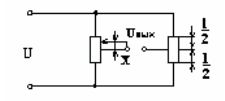
5. Fejl på grund af belastningspåvirkning.
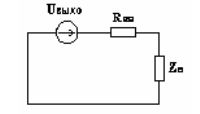
Afhængigt af belastningens art opstår der en fejl, både i statisk og dynamisk tilstand. Ved aktiv belastning ændres den statiske karakteristik. Udgangsspændingsværdien vil blive bestemt i henhold til udtrykket: Uout = (UrRn) / (RRn + Rr-r2)
Disse. Uout = f (r) afhænger af Rn. Med Rn >> R kan det vises, at Uout = (U / R) r;
når Rn er omtrent lig med R, er afhængigheden ikke-lineær, og sensorens maksimale fejl vil være, når skyderen afviger fra (2/3))l. Vælg normalt Rн / R = 10 … 100. Størrelsen af fejlen ved x = (2/3) l kan bestemmes ved udtrykket: E = 4/27η, hvor η= Rн / R — belastningsfaktor.
Potentiometrisk sensor under belastning
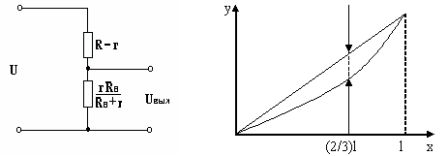 a — Tilsvarende kredsløb for en potentiometrisk sensor med en belastning, b — Indflydelse af belastningen på den statiske karakteristik af den potentiometriske sensor.
a — Tilsvarende kredsløb for en potentiometrisk sensor med en belastning, b — Indflydelse af belastningen på den statiske karakteristik af den potentiometriske sensor.
Dynamiske karakteristika for potentiometriske sensorer
Transmissionsfunktion
For at udlede overførselsfunktionen er det mere bekvemt at tage belastningsstrømmen som udgangsværdien; det kan bestemmes ved hjælp af den ækvivalente generatorsætning. B = Uout0 / (Rvn + Zn)
Overvej to tilfælde:
1. Belastningen er rent aktiv Zn = Rn, fordi Uout0 = K1x In = K1x / (Rin + Rn)
hvor K1 er sensorens tomgangshastighed.
Ved at anvende Laplace-transformationen får vi overførselsfunktionen W (p) = In (p) / X (p) = K1 / (Rin + Rn) = K
På den måde fik vi en inertifri forbindelse, hvilket betyder, at sensoren har alle de frekvens- og tidskarakteristika, der svarer til denne forbindelse.
Tilsvarende kredsløb
2. Induktiv belastning med en aktiv komponent.
U = RvnIn + L (dIn / dt) + RnIn
Ved at anvende Laplace-transformationen opnår vi Uoutx (p) = In (p) [(Rvn + pL) + Rn]
Gennem transformationer kan man nå frem til en overførselsfunktion af formen W (p) = K / (Tp + 1) - en aperiodisk forbindelse af 1. orden,
hvor K = K1 / (Rvn + Rn)
T = L/(Rvn + Rn);
Intern støj fra potentiometersensoren
 Som vist, når børsten bevæger sig fra drejning til drejning, ændres udgangsspændingen brat. Fejlen, der skabes ved stepping, er i form af en savtandspænding, der er overlejret overførselsfunktionens udgangsspænding, dvs. er støj. Hvis børsten vibrerer, skaber bevægelsen også støj (interferens). Frekvensspektret af vibrationsstøj er i lydfrekvensområdet.
Som vist, når børsten bevæger sig fra drejning til drejning, ændres udgangsspændingen brat. Fejlen, der skabes ved stepping, er i form af en savtandspænding, der er overlejret overførselsfunktionens udgangsspænding, dvs. er støj. Hvis børsten vibrerer, skaber bevægelsen også støj (interferens). Frekvensspektret af vibrationsstøj er i lydfrekvensområdet.
For at eliminere vibrationer er strømaftagere lavet af flere ledninger af forskellig længde foldet sammen. Så vil den naturlige frekvens af hver ledning være anderledes, dette forhindrer udseendet af teknisk resonans. Niveauet af termisk støj er lavt, de tages i betragtning i særligt følsomme systemer.
Funktionelle potentiometriske sensorer
Det skal bemærkes, at i automatisering bruges funktionelle overførselsfunktioner ofte til at opnå ikke-lineære afhængigheder. De er konstrueret på tre måder:
-
ændring af trådens diameter langs spolen;
-
ændring af spolestigning;
-
brugen af en ramme med en bestemt konfiguration;
-
ved at manøvrere sektionerne af lineære potentiometre med modstande af forskellig størrelse.
For eksempel, for at opnå en kvadratisk afhængighed ifølge den tredje metode, er det nødvendigt at ændre bredden af rammen lineært, som vist på figuren.
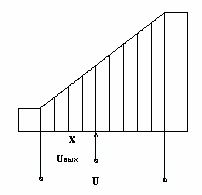
Funktionel potentiometer sensor
Multi-turn potentiometer
Konventionelle potentiometersensorer har et begrænset driftsområde. Dens værdi bestemmes af rammens geometriske dimensioner og antallet af spoleomdrejninger. De kan ikke stige i det uendelige. Derfor har multi-turn potentiometer sensorer fundet anvendelse, hvor et resistivt element er snoet i en spirallinje med flere vindinger, deres akse skal drejes flere gange, så motoren bevæger sig fra den ene ende af spolen til den anden, dvs. den elektriske rækkevidde af sådanne sensorer er et multiplum af 3600.
Den største fordel ved multi-turn potentiometre er deres høje opløsning og nøjagtighed, som opnås på grund af den store længde af det resistive element med små overordnede dimensioner.
Fotopotentiometre
Fotopotentiometer — er en berøringsfri analog til et konventionelt potentiometer med et resistivt lag, den mekaniske kontakt i det er erstattet af en fotoledende, hvilket naturligvis øger pålideligheden og levetiden. Signalet fra fotopotentiometeret styres af en lyssonde, der fungerer som en skyder. Det er dannet af en speciel optisk enhed og kan forskydes som et resultat af ekstern mekanisk påvirkning langs det fotoledende lag. På det punkt, hvor fotolaget er eksponeret, opstår der overskydende (sammenlignet med mørk) fotoledningsevne, og der skabes en elektrisk kontakt.
Fotopotentiometre er opdelt efter formål i lineære og funktionelle.
Funktionelle fotopotentiometre gør det muligt at konvertere lyskildens rumlige bevægelse til et elektrisk signal med en given funktionel form på grund af det profilerede resistive lag (hyperbolsk, eksponentiel, logaritmisk).