Thyristor elektrisk drev
 I industrien er aktuatorer med kontrollerede halvlederventiler - tyristorer - meget udbredt. Thyristorer er fremstillet til strømme op til hundredvis af ampere, til spændinger op til 1000 volt eller mere. De er kendetegnet ved høj effektivitet, relativt lille størrelse, høj hastighed og evnen til at arbejde i en bred vifte af omgivende temperaturer (fra -60 til +60 ° C).
I industrien er aktuatorer med kontrollerede halvlederventiler - tyristorer - meget udbredt. Thyristorer er fremstillet til strømme op til hundredvis af ampere, til spændinger op til 1000 volt eller mere. De er kendetegnet ved høj effektivitet, relativt lille størrelse, høj hastighed og evnen til at arbejde i en bred vifte af omgivende temperaturer (fra -60 til +60 ° C).
Tyristoren er ikke en fuldt kontrollerbar enhed, som tændes ved at påføre det tilsvarende potentiale til styreelektroden, og som kun slukkes ved tvungen afbrydelse af strømkredsløbet på grund af afbrydelsesspænding, dens naturlige overgang gennem nul eller forsyning af en dæmpning spænding af det modsatte fortegn. Ved at ændre timingen af forsyningen af styrespændingen (dens forsinkelse) kan du justere gennemsnitsværdien af den ensrettede spænding og dermed motorens hastighed.
Gennemsnitsværdien af den ensrettede spænding i mangel af regulering bestemmes hovedsageligt af tyristorkonverterens omskifterkredsløb. Transducerkredsløb er opdelt i to klasser: nul-pull og brokoblede.
I mellemstore og høje effektinstallationer bruges brokonverterkredsløb hovedsageligt, hvilket hovedsageligt er af to årsager:
-
mindre spænding på hver af tyristorerne,
-
fravær af en konstant strømkomponent, der strømmer gennem transformatorviklingerne.
Konverterkredsløb kan også variere i antallet af faser: fra én i laveffektinstallationer til 12 — 24 i kraftige omformere.
Alle varianter af tyristorkonvertere sammen med positive egenskaber, såsom lav inerti, mangel på roterende elementer, mindre (sammenlignet med elektromekaniske omformere) i størrelse, har en række ulemper:
1. Hård forbindelse til netværket: alle spændingsudsving i netværket overføres direkte til drivsystemet og belastningen øges, motorakserne overføres straks til netværket og forårsager strømstød.
2. Lav effektfaktor ved nedjustering af spændingen.
3. Generering af højere harmoniske, belastning på elnettet.
Mekaniske egenskaber for en motor drevet af en tyristorkonverter bestemmes af den spænding, der påføres ankeret og arten af dens ændring med belastningen, det vil sige konverterens ydre karakteristika og konverterens og motorens parametre.
Enheden og princippet om drift af tyristoren
En tyristor (fig. 1, a) er en firelags siliciumhalvleder med to pn-forbindelser og en n-p-forbindelse. Størrelsen af strømmen Az, der passerer gennem tyristoren under påvirkning af anodespændingen Ua, afhænger af strømmen Az under styringen, der passerer gennem styreelektroden under påvirkning af styrespændingen Uy.
Hvis der ikke er nogen styrestrøm (Azy = 0), vil strømmen A i brugerens P kredsløb stige, når spændingen U stiger, men forbliver en meget lille værdi (fig. 1, b).

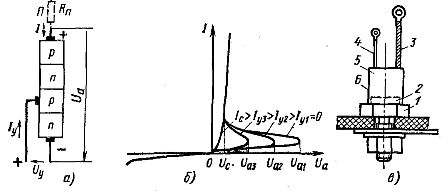
Ris. 1. Blokdiagram (a), strøm-spændingskarakteristik (b) og konstruktion (c) af tyristoren
På dette tidspunkt har n-p krydset tændt i den ikke-ledende retning en høj modstand. Ved en vis værdi Ua1 af anodespændingen, kaldet åbnings-, tændings- eller koblingsspændingen, sker der et lavinenedbrydning af blokeringslaget, dets modstand bliver lille, og strømstyrken stiger til en værdi bestemt i overensstemmelse med Ohms lov af modstanden Rp af brugeren P.
Når strømmen Iу stiger, falder spændingen Ua. Strømmen Iu, ved hvilken spændingen Ua når den laveste værdi, kaldes strømmen I med korrektion.
Tyristoren lukker, når spændingen Ua fjernes, eller når dens fortegn ændres. Tyristorens nominelle strøm I er den største gennemsnitsværdi af strømmen, der flyder i fremadgående retning, som ikke forårsager uacceptabel overophedning.
Nominel spænding Un kaldes den højest tilladte amplitudespænding, ved hvilken enhedens givne pålidelighed er sikret.
Spændingsfaldet ΔUnskabt af den nominelle strøm kaldes det nominelle spændingsfald (normalt ΔUn = 1 — 2 V).
Værdien af korrektionens strømstyrke Ic svinger inden for grænserne på 0,1 - 0,4 A ved en spænding Uc 6 - 8 V.
Tyristoren åbner pålideligt med en pulsvarighed på 20 - 30 μs. Intervallet mellem impulser bør ikke være mindre end 100 μs. Når spændingen Ua falder til nul, slukker tyristoren.
Det udvendige design af tyristoren er vist i fig.1, v... Kobberbaseret 1 sekstende silicium fire-lags struktur 2 med gevindhale, med negativ effekt 3 og kontrol af 4 udgange. Siliciumstrukturen er beskyttet af et cylindrisk metalhus 5. Isolatoren er fastgjort i huset 6. Et gevind i basen 1 bruges til at installere en tyristor og til at forbinde anodespændingskilden til den positive pol.
Når spændingen Ua stiger, falder den styrestrøm, der kræves for at åbne tyristoren (se fig. 1, b). Styreåbningsstrømmen er proportional med styreåbningsspændingen uyo.
Hvis Uа ændrer sig i henhold til sinusloven (fig. 2), kan den nødvendige spænding og 0-åbning afbildes med en stiplet linje. Hvis den påførte styrespænding Uy1 er konstant, og dens værdi er under minimumsværdien af spændingen uuo, åbner tyristoren ikke.
Hvis styrespændingen øges til værdien Uy2, åbner tyristoren, så snart spændingen Uy2 bliver større end spændingen uyo. Ved at ændre uу-værdien kan du ændre tyristorens åbningsvinkel i området fra 0 til 90°.
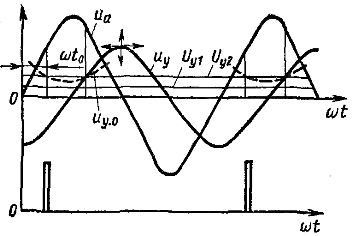
Ris. 2. Tyristorkontrol
For at åbne tyristoren i vinkler over 90° bruges en variabel styrespænding uy, som ændres for eksempel sinusformet. Ved en spænding svarende til skæringen af denne spændings sinusbølge med den stiplede kurve uuo = f (ωt), åbner Tiristoren.
Ved at flytte sinusformen uyo vandret til højre eller venstre, kan du ændre vinklen ωt0 åbning af tyristoren. Denne åbningsvinkelkontrol kaldes vandret. Det udføres ved hjælp af specielle faseafbrydere.
Ved at flytte den samme sinusbølge lodret op eller ned, kan du også ændre åbningsvinklen. Sådan styring kaldes vertikal. I dette tilfælde, med variabel spændingsstyring tyy, tilføjes en konstant spænding algebraisk, for eksempel spændingen Uy1... Åbningsvinklen justeres ved at ændre størrelsen af denne spænding.
Når den er åbnet, forbliver tyristoren åben indtil slutningen af den positive halvcyklus, og styrespændingen påvirker ikke dens drift. Dette gør det også muligt at anvende pulsstyring ved periodisk at påføre positive styrespændingsimpulser på det rigtige tidspunkt (fig. 2 nederst). Dette øger kontrollens klarhed.
Ved at ændre tyristorens åbningsvinkel på den ene eller anden måde kan spændingsimpulser af forskellig form påføres brugeren. Dette ændrer værdien af den gennemsnitlige spænding ved brugerens terminaler.
Forskellige enheder bruges til at styre tyristorer. I skemaet vist i fig. 3, tilføres AC-netspændingen til primærviklingen af transformeren Tp1.
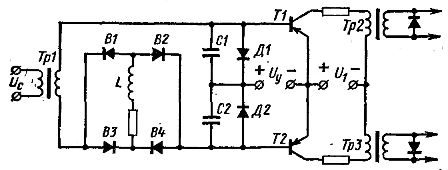
Ris. 3. Tyristorkontrolkredsløb
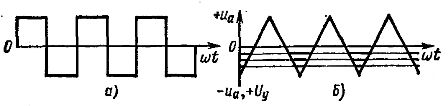
En fuldbølgeensretter B er inkluderet i denne transformers sekundære kredsløb.1, B2, B3, B4 med en signifikant induktans L i DC-kredsløbet. Den praktiske bølgestrøm er praktisk talt elimineret. Men en sådan jævnstrøm kan kun opnås ved fuldbølge ensretning af en vekselstrøm med formen vist i fig. 4, a.
I dette tilfælde er ensretteren B1, B2, B3, B4 (se fig. 3) således en omformer i form af vekselstrøm. I dette skema veksler kondensatorerne C1 og C2 i serie med rektangulære strømimpulser (fig. 4, a).I dette tilfælde dannes der på pladerne af kondensatorerne C1 og C2 (fig. 4, b) en tværgående savtandspænding, der påføres baserne af transistorerne T1 og T2 (se fig. 3).
Denne spænding kaldes referencespændingen. DC-spændingen Uy virker også i hver transistors hovedkredsløb. Når savspændingen er nul, skaber spændingen Uy positive potentialer ved basen af begge transistorer. Hver transistor åbner med en basisstrøm ved et negativt basepotentiale.
Dette sker, når de negative værdier af savens referencespænding viser sig at være større end Uy (fig. 4, b). Denne betingelse er opfyldt afhængigt af værdien af Uy ved forskellige værdier af fasevinklen. I dette tilfælde åbner transistoren i forskellige tidsrum, afhængigt af størrelsen af spændingen Uy.
Ris. 4. Diagrammer over tyristorstyrespændinger
Når den ene eller den anden transistor åbner, passerer en rektangulær strømimpuls gennem primærviklingen af transformatoren Tr2 eller Tr3 (se fig. 3). Når forkanten af denne puls passerer, opstår der en spændingsimpuls i sekundærviklingen, som påføres tyristorens styreelektrode.
Når bagsiden af strømimpulsen passerer gennem sekundærviklingen, opstår der en spændingsimpuls med modsat polaritet. Denne impuls lukkes af en halvlederdiode, der omgår sekundærviklingen og ikke påføres tyristoren.
Når tyristorerne styres (se fig. 3) med to transformere, genereres der to impulser, faseforskydning med 180 °.
Tyristor motorstyringssystemer
I tyristorstyringssystemer til DC-motorer bruges en ændring i motorens DC-ankerspænding til at styre dens hastighed. I disse tilfælde anvendes der sædvanligvis flerfasede opretningsordninger.
I fig. 5, og det enkleste diagram af denne art er vist med en ubrudt linje. I dette kredsløb er hver af tyristorerne T1, T2, T3 forbundet i serie med transformatorens sekundære vikling og motorarmaturet; NS. etc. c. sekundærviklingerne er ude af fase. Derfor påføres spændingsimpulser, der er faseforskudt i forhold til hinanden, til motorankeret, når tyristorernes åbningsvinkel styres.
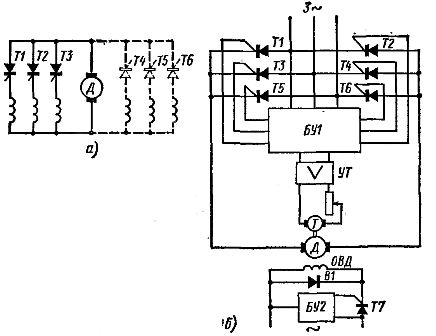
Ris. 5. Thyristor-drivkredsløb
I et flerfasekredsløb kan intermitterende og kontinuerlige strømme passere gennem motorens anker, afhængigt af den valgte affyringsvinkel for tyristorerne. Et reversibelt elektrisk drev (fig. 5, a, hele kredsløbet) bruger to sæt tyristorer: T1, T2, T3 og T4, T5, T6.
Ved at åbne tyristorerne i en bestemt gruppe ændrer de retningen af strømmen i ankeret på den elektriske motor og følgelig retningen af dens rotation.
Reversering af motoren kan også opnås ved at ændre retningen af strømmen i motorens feltvikling. En sådan revers bruges i tilfælde, hvor høj hastighed ikke er påkrævet, fordi feltviklingen har en meget høj induktans sammenlignet med ankerviklingen. Et sådant omvendt slag bruges ofte til tyristordrev af hovedbevægelsen af metalskæremaskiner.
Det andet sæt tyristorer gør det også muligt at udføre bremsetilstande, der kræver en ændring i retningen af strømmen i den elektriske motors anker.Tyristorer i de undersøgte drivkredsløb bruges til at tænde og slukke motoren samt begrænse start- og bremsestrømmene, hvilket eliminerer behovet for at bruge kontaktorer samt start- og bremsereostater.
I DC-tyristor-drivkredsløb er strømtransformatorer uønskede. De øger størrelsen og omkostningerne ved installationen, så de bruger ofte kredsløbet vist i fig. 5 B.
I dette kredsløb styres tændingen af tyristoren af styreenheden BU1. Den er forbundet til et trefaset strømnetværk, der giver strøm og matcher styreimpulsernes faser med tyristorernes anodespænding.
Et tyristordrev bruger normalt motorhastighedsfeedback. I dette tilfælde anvendes en tachogenerator T og en mellemtransistorforstærker UT. E-mail feedback bruges også. etc. c. elektrisk motor, realiseret ved samtidig virkning af negativ feedback på spænding og positiv feedback på ankerstrøm.
Til justering af excitationsstrømmen anvendes en tyristor T7 med en styreenhed BU2. Ved negative halvcyklusser af anodespændingen, når tyristoren T7 ikke passerer strøm, fortsætter strømmen i OVD'en på grund af f.eks. etc. c. selvinduktion, der lukker gennem bypass-ventilen B1.
Thyristor elektriske drev med pulsbreddekontrol
I de betragtede tyristordrev drives motoren af spændingsimpulser med en frekvens på 50 Hz. For at øge responshastigheden anbefales det at øge pulsfrekvensen.Dette opnås i tyristordrev med pulsbreddestyring, hvor rektangulære DC-impulser af varierende varighed (breddegrad) med en frekvens på op til 2-5 kHz passerer gennem motorankeret. Ud over højhastighedsrespons giver en sådan kontrol store motorhastighedskontrolområder og højere energiydelse.
Med pulsbreddestyring drives motoren af en ukontrolleret ensretter, og tyristoren forbundet i serie med ankeret lukkes og åbnes periodisk. I dette tilfælde passerer DC-impulserne gennem motorens ankerkredsløb. En ændring i varigheden (breddegraden) af disse impulser resulterer i en ændring i den elektriske motors rotationshastighed.
Da tyristoren i dette tilfælde fungerer ved konstant spænding, bruges specielle kredsløb til at lukke den. Et af de enkleste pulsbreddestyringsskemaer er vist i fig. 6.
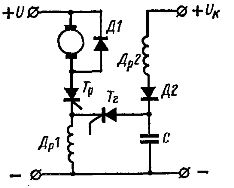
Ris. 6. Thyristor elektrisk drev med pulsbreddekontrol
I dette kredsløb er tyristoren Tr slukket, når dæmpningstyristoren Tr er tændt. Når denne tyristor åbner, aflades den ladede kondensator C til gashåndtag Dr1, hvilket skaber en signifikant e. etc. c. I dette tilfælde opstår der en spænding i enderne af drosselspolen, som er større end spændingen U på ensretteren og rettet mod den.
Gennem en ensretter og shuntdiode D1 tilføres denne spænding til tyristoren Tr og får den til at slukke. Når tyristoren er slukket, oplades kondensatoren C igen til koblingsspændingen Uc > U.
På grund af den øgede frekvens af strømimpulser og motorarmaturets inerti afspejles strømforsyningens impulskarakter praktisk talt ikke i jævnheden af motorrotationen. Tyristorerne Tr og Tr åbnes af et specielt faseskiftekredsløb, der gør det muligt at ændre pulsbredden.
Den elektriske industri producerer forskellige modifikationer af fuldt regulerede tyristor jævnstrømsdrev. Blandt dem er drev med 1:20 hastighedskontrolområder; 1: 200; 1: 2000 ved at ændre spændingen, irreversible og reversible drev, med og uden elektrisk bremsning. Styring udføres ved hjælp af transistor fase-pulsenheder. Drev bruger negativ feedback på motoromdrejninger og e. tæller osv. med
Fordelene ved tyristordrev er høje energiegenskaber, lille størrelse og vægt, fraværet af andet roterende maskineri end en elektrisk motor, høj hastighed og konstant klarhed til arbejde.Den største ulempe ved tyristordrev er deres stadig høje omkostninger, som væsentligt overstiger omkostningerne ved drev med en elektrisk maskine og magnetiske forstærkere.
I øjeblikket er der en konstant tendens til udbredt udskiftning af tyristor DC-drev med frekvensomformere med variabel frekvens.