Princippet om drift og enheden af den elektriske motor
Enhver elektrisk motor er designet til at udføre mekanisk arbejde på grund af forbruget af elektricitet påført den, som normalt omdannes til roterende bevægelse. Selvom der i teknologi er modeller, der straks skaber en translationel bevægelse af arbejdskroppen. Disse kaldes lineære motorer.
I industrielle installationer driver elektriske motorer forskellige metalskæremaskiner og mekaniske enheder, der er involveret i den teknologiske produktionsproces.
Inde i husholdningsapparater kører elektriske motorer vaskemaskiner, støvsugere, computere, hårtørrere, legetøj til børn, ure og mange andre enheder.

Grundlæggende fysiske processer og handlingsprincip
Når man bevæger sig indenfor magnetfelt elektriske ladninger, som kaldes elektriske strømme, har altid en mekanisk kraft, der har en tendens til at afbøje deres retning i et plan vinkelret på orienteringen af de magnetiske feltlinjer.Når en elektrisk strøm passerer gennem en metaltråd eller en spole lavet af den, har denne kraft en tendens til at flytte/rotere hver strømførende ledning og hele spolen som helhed.
Billedet nedenfor viser en metalramme med strøm gennem den. Et magnetfelt påført det skaber en kraft F for hver gren af rammen, hvilket skaber en rotationsbevægelse.

Denne egenskab for samspillet mellem elektrisk og magnetisk energi, baseret på skabelsen af en elektromotorisk kraft i en lukket ledende sløjfe, sættes i drift på hver elektrisk motor. Dens design inkluderer:
-
en spole, hvorigennem en elektrisk strøm løber. Den er placeret på en speciel ankerkerne og fastgjort i roterende lejer for at reducere modstanden mod friktionskræfter. Dette design kaldes en rotor;
-
stator, som skaber et magnetfelt, som med sine kraftlinjer trænger ind i elektriske ladninger, der passerer langs rotorviklingens drejninger;
-
hus til placering af stator. Inde i kroppen er der lavet specielle sæder, indeni hvilke de ydre bure af rotorlejerne er monteret.
Det forenklede design af den enkleste elektriske motor kan repræsenteres af et billede af følgende form.

Når rotoren roterer, genereres et drejningsmoment, hvis effekt afhænger af enhedens generelle design, mængden af påført elektrisk energi og dens tab under konverteringer.
Størrelsen af motorens maksimalt mulige drejningsmoment er altid mindre end den elektriske energi, der påføres den. Det er kendetegnet ved effektivitetsværdien.
Typer af elektriske motorer
I henhold til typen af strøm, der strømmer gennem spolerne, er de opdelt i DC- eller AC-motorer.Hver af disse to grupper har et stort antal modifikationer ved hjælp af forskellige teknologiske processer.
DC motorer
De har et statormagnetisk felt skabt af en stationær fast permanente magneter eller specielle elektromagneter med excitationsspoler. Armaturspolen er solidt monteret i akslen, som er fastgjort i lejer og kan rotere frit om sin egen akse.
Den grundlæggende struktur af en sådan motor er vist i figuren.

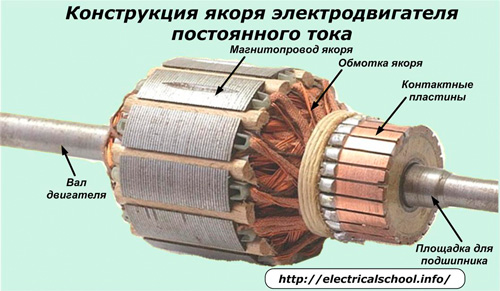
På kernen af ankeret, der er lavet af ferromagnetiske materialer, er der en spole bestående af to serieforbundne dele, som er forbundet med de ledende kollektorplader i den ene ende og forbundet med hinanden i den anden. To grafitbørster er placeret i diametralt modsatte ender af ankeret og presses mod kontaktpladerne på samlepladerne.
Et positivt DC-kildepotentiale påføres den nederste mønsterbørste og et negativt potentiale på den øverste. Retningen af strømmen, der løber gennem spolen, er vist med en stiplet rød pil.
Strømmen får magnetfeltet til at have en nordpol nederst til venstre i ankeret, og en sydpol øverst til højre i ankeret (kardansk regel). Dette resulterer i frastødning af rotorpolerne fra de stationære af samme navn og tiltrækning til statorens modsatte poler. Som et resultat af den påførte kraft opstår en rotationsbevægelse, hvis retning er angivet med en brun pil.
Ved yderligere rotation af ankeret ved inerti overføres polerne til andre kollektorplader. Retningen af strømmen i dem er omvendt. Rotoren fortsætter med at rotere yderligere.
Det enkle design af en sådan samleanordning fører til store tab af elektrisk energi.Sådanne motorer fungerer i enheder med simpelt design eller legetøj til børn.
De elektriske jævnstrømsmotorer, der er involveret i produktionsprocessen, har et mere komplekst design:
-
spolen er ikke opdelt i to, men i flere dele;
-
hver sektion af spolen er monteret på sin egen pol;
-
samleanordningen er lavet med et vist antal kontaktpuder i henhold til antallet af viklinger.
Som et resultat skabes en jævn forbindelse af hver pol gennem dens kontaktplader til børsterne og strømkilden, og energitabet reduceres.
Enheden af et sådant anker er vist på billedet.
I DC-motorer kan rotorens rotationsretning vendes. For at gøre dette er det nok at ændre strømmen af strømmen i spolen til det modsatte ved at ændre polariteten ved kilden.
AC motorer
De adskiller sig fra tidligere designs ved, at den elektriske strøm, der flyder i deres spole, er beskrevet ved sinusformet harmonisk lovmed jævne mellemrum at ændre retning (tegn). For at drive dem leveres spænding fra generatorer med skiftende tegn.
Statoren af sådanne motorer udføres af et magnetisk kredsløb. Den er lavet af ferromagnetiske plader med riller, hvori spolens vindinger er placeret med en ramme (spole) konfiguration.

Synkrone elektriske motorer
Billedet nedenfor viser princippet om drift af en enfaset vekselstrømsmotor med synkron rotation af rotorens og statorens elektromagnetiske felter.

I rillerne i statorens magnetiske kredsløb ved diametralt modsatte ender er der anbragt viklingstråde, skematisk vist i form af en ramme, gennem hvilken en vekselstrøm løber.
Lad os betragte tilfældet med tidspunktet svarende til passagen af den positive del af dens halvbølge.
I lejecellerne roterer en rotor med en indbygget permanent magnet frit, hvor den nordlige «N-munding» og den sydlige «S-munding» af polen er klart defineret. Når en positiv halvbølge af strøm løber gennem statorviklingen, skabes et magnetfelt med polerne «S st» og «N st» i den.
Interaktionskræfter opstår mellem rotorens og statorens magnetfelter (med polerne frastødende og i modsætning til polerne tiltrækker), som har tendens til at dreje motorarmaturet fra enhver position til det yderste, når de modsatte poler er placeret så tæt som muligt på hinanden en anden.
Hvis vi betragter det samme tilfælde, men i det øjeblik, hvor det modsatte - en negativ halvbølge af strøm passerer gennem rammetråden, vil rotationen af ankeret ske i den modsatte retning.
For at sikre kontinuerlig bevægelse af rotoren i statoren er der ikke lavet en viklingsramme, men et vist antal af dem, givet at hver af dem er drevet af en separat strømkilde.
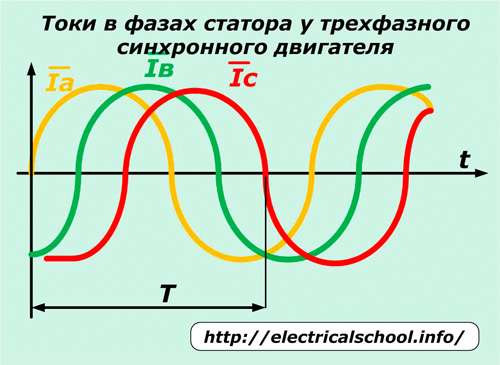
Arbejdsprincippet for en trefaset vekselstrømsmotor med synkron rotation, de elektromagnetiske felter af rotoren og statoren er vist på det følgende billede.

I dette design er tre spoler A, B og C monteret inde i statormagnetkredsløbet, forskudt af vinkler på 120 grader i forhold til hinanden. Spole A er markeret med gul, B er grøn og C er rød. Hver spole er lavet med de samme rammer som i det foregående tilfælde.
På billedet løber strømmen under alle omstændigheder kun gennem én spole i frem- eller baglæns retning, hvilket er angivet med tegnene «+» og «-«.
Når den positive halvbølge passerer gennem fase A i fremadgående retning, indtager rotorfeltets akse en vandret position, fordi statorens magnetiske poler er dannet i dette plan og tiltrækker det bevægelige anker. Rotorens modsatte poler har en tendens til at nærme sig statorens poler.
Når den positive halvbølge går ind i fase C, vil ankeret rotere 60 grader med uret. Når først strøm er påført fase B, vil en lignende ankerrotation forekomme. Hver efterfølgende strøm i den næste fase af den næste vikling vil dreje rotoren.
Hvis en trefaset netspænding forskudt med en vinkel på 120 grader påføres hver vikling, vil vekselstrømme cirkulere i dem, hvilket vil rotere ankeret og skabe dets synkrone rotation med det påførte elektromagnetiske felt.
Det samme mekaniske design bruges med succes i en trefaset stepmotor... Kun i hver vikling ved kontrol speciel controller (trinmotordriver) Konstante impulser påføres og fjernes i overensstemmelse med den ovenfor beskrevne algoritme.
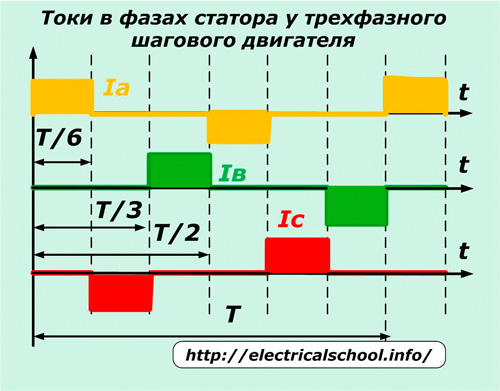
Deres opstart starter en rotationsbevægelse, og deres afslutning på et bestemt tidspunkt giver en målt rotation af akslen og et stop i en programmeret vinkel for at udføre visse teknologiske operationer.
I begge beskrevne trefasesystemer er det muligt at ændre ankerets rotationsretning. For at gøre dette skal du bare ændre rækkefølgen af faser «A» — «B» — «C» til en anden, for eksempel «A» — «C» — «B».
Rotorens hastighed reguleres af længden af perioden T. Dens reduktion fører til en acceleration af rotationen.Størrelsen af amplituden af strømmen i fasen afhænger af viklingens indre modstand og værdien af den spænding, der påføres den. Det bestemmer mængden af drejningsmoment og effekt af elmotoren.
Asynkrone motorer
Disse motordesigner har det samme statormagnetiske kredsløb med viklinger som i de tidligere diskuterede enfasede og trefasede modeller. De får deres navn fra den asynkrone rotation af armaturet og statorens elektromagnetiske felter. Dette gøres ved at forbedre rotorens konfiguration.
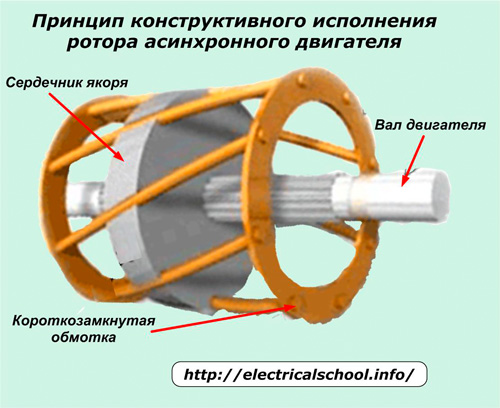
Dens kerne er lavet af rillede elektriske stålplader. De er udstyret med strømledere af aluminium eller kobber, som er lukket i enderne af ankeret med ledende ringe.
Når spænding påføres statorviklingerne, induceres en elektrisk strøm i rotorviklingen af elektromotorisk kraft, og der dannes et ankermagnetisk felt. Når disse elektromagnetiske felter interagerer, begynder motorakslen at rotere.
Med dette design er rotorens bevægelse kun mulig efter forekomsten af et roterende elektromagnetisk felt i statoren, og den fortsætter i en asynkron driftsform med den.
Asynkronmotorer er mere enkle i design, derfor er de billigere og bruges i vid udstrækning i industrielle installationer og husholdningsapparater.

ABB eksplosionssikker elmotor
Lineære motorer
Mange arbejdslegemer af industrielle mekanismer udfører frem- og tilbagegående eller translationel bevægelse i et plan, hvilket er nødvendigt for driften af metalbearbejdningsmaskiner, køretøjer, hammerslag, når du slår pæle ...
At flytte et sådant arbejdslegeme ved hjælp af gearkasser, kugleskruer, remdrev og lignende mekaniske anordninger fra en roterende elektrisk motor komplicerer designet. Den moderne tekniske løsning på dette problem er driften af en lineær elektrisk motor.
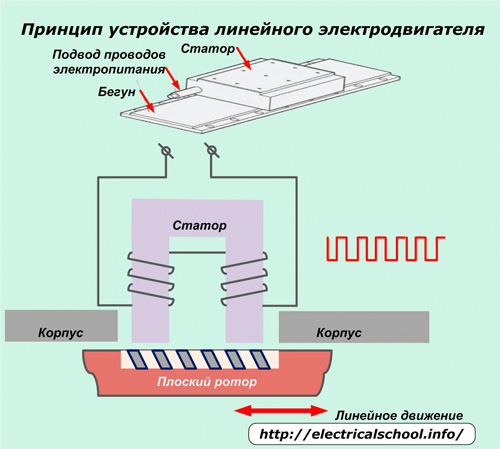
Dens stator og rotor er aflange i form af strimler, snarere end viklet ind i ringe, som i roterende elektriske motorer.
Funktionsprincippet er at give løberrotoren frem- og tilbagegående lineær bevægelse på grund af overførslen af elektromagnetisk energi fra en stationær stator med et åbent magnetisk kredsløb af en vis længde. Et fungerende magnetfelt skabes inde i det ved sekventielt at tænde for strømmen.
Det virker på ankerviklingen med en opsamler. De kræfter, der opstår i en sådan motor, bevæger kun rotoren i en lineær retning langs styreelementerne.
Lineære motorer er designet til at fungere på enten jævnstrøm eller vekselstrøm og kan fungere i synkron eller asynkron tilstand.
Ulemperne ved lineære motorer er:
-
kompleksiteten af teknologien;
-
høj pris;
-
lav energieffektivitet.