Thyristor DC / DC konvertere
 Thyristor DC / DC-konverter (DC) er en enhed til at konvertere vekselstrøm til jævnstrøm med regulering i henhold til en given lov for udgangsparametrene (strøm og spænding). Thyristor-konvertere er designet til at drive ankerkredsløb af motorer og deres feltviklinger.
Thyristor DC / DC-konverter (DC) er en enhed til at konvertere vekselstrøm til jævnstrøm med regulering i henhold til en given lov for udgangsparametrene (strøm og spænding). Thyristor-konvertere er designet til at drive ankerkredsløb af motorer og deres feltviklinger.
Thyristorkonvertere består af følgende grundlæggende enheder:
• en transformer eller strømbegrænsende reaktor på AC-siden,
• ensretterblokke,
• udjævningsreaktorer,
• elementer i kontrol-, beskyttelses- og signalsystemet.
Transformatoren matcher konverterens indgangs- og udgangsspændinger og begrænser (ligesom den strømbegrænsende reaktor) kortslutningsstrømmen i indgangskredsløbene. Udjævningsreaktorer er designet til at udjævne krusningen af den ensrettede spænding og strøm. Reaktorer er ikke tilvejebragt, hvis belastningsinduktansen er tilstrækkelig til at begrænse krusningen inden for visse grænser.
Brugen af tyristor DC-DC-omformere gør det muligt at realisere praktisk talt de samme elektriske drivkarakteristika som ved brug af roterende omformere i generator-motor systemer (D — D), det vil sige at justere motorens hastighed og drejningsmoment over et bredt område, for at opnå specielle mekaniske egenskaber og den ønskede karakter af transienterne ved start, stop, bakning osv.
Men sammenlignet med roterende statiske omformere har de en række kendte fordele, hvorfor statiske omformere foretrækkes i nyudviklinger af kran elektriske drev. Thyristor DC-DC-konvertere er de mest lovende til brug i elektriske drev af kranmekanismer med en effekt på mere end 50-100 kW og mekanismer, hvor det er nødvendigt at opnå specielle egenskaber ved drevet i statiske og dynamiske tilstande.
Udbedringsordninger, principper for konstruktion af strømkredsløb af omformere
Thyristorkonvertere er lavet med enfaset og flerfaset korrigerende kredsløb… Der er flere designforhold for de grundlæggende udbedringsordninger. Et af disse skemaer er vist i fig. 1, a. Regulering af spænding Va og strøm Ia frembragt ved at ændre styrevinklen α... I fig. 1, b-e, er for eksempel arten af ændringen af strømme og spændinger i et trefaset nul-enretningskredsløb med en aktiv-induktiv belastning vist
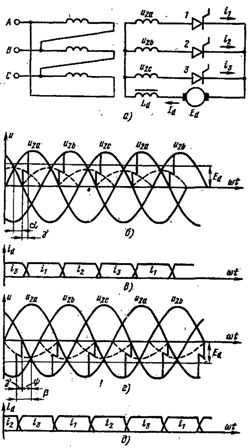
Ris. 1. Trefaset neutralt kredsløb (a) og diagrammer over strøm- og spændingsændringer i ensretter (b, c) og inverter (d, e) tilstande.
Vinklen vist i diagrammerne γ (omskiftningsvinkel) karakteriserer det tidsrum, hvor strømmen løber samtidigt gennem to tyristorer. Afhængigheden af gennemsnitsværdien af den justerede spænding Вa af justeringsvinklen α kaldes kontrolkarakteristikken.
For neutrale kredsløb er den gennemsnitlige ensrettede spænding givet ved udtrykket
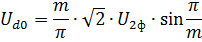
hvor m - antallet af faser af transformatorens sekundære vikling; U2f er effektivværdien af fasespændingen af transformatorens sekundære vikling.
For brokredsløb Udo 2 gange højere, fordi disse kredsløb svarer til serieforbindelse af to nulkredsløb.
Enkeltfasede korrektionskredsløb anvendes som regel i kredsløb med relativt store induktive modstande Disse er kredsløb af uafhængige magnetiseringsviklinger af motorer samt armaturkredsløb af laveffektmotorer (op til 10-15 kW). Flerfasekredsløb bruges hovedsageligt til støbning af ankerkredsløb af motorer med en effekt på mere end 15-20 kW og sjældnere til strømforsyning af feltviklinger. Sammenlignet med enfasede har flerfasede ensretterkredsløb en række fordele. De vigtigste er: lavere pulsering af den ensrettede spænding og strøm, bedre brug af transformeren og tyristorerne, symmetrisk belastning af faserne i forsyningsnetværket.
I tyristor DC-DC omformere beregnet til krandrev med en effekt på mere end 20 kW, anvendes trefaset brokredsløb… Dette skyldes den gode udnyttelse af transformeren og tyristorerne, det lave bølgeniveau af den ensrettede spænding og strøm og enkelheden af transformatorkredsløbet og designet.En velkendt fordel ved et trefaset brokredsløb er, at det ikke kan laves med en transformerforbindelse, men med en strømbegrænsende reaktor, hvis dimensioner er væsentligt mindre end transformatorens dimensioner.
I et trefaset neutralt kredsløb er betingelserne for at bruge transformeren med almindeligt anvendte forbindelsesgrupper D / D og Δ / Y værre på grund af tilstedeværelsen af en konstant komponent af fluxen. Dette fører til en stigning i tværsnittet af det magnetiske kredsløb og følgelig transformatorens designeffekt. For at eliminere den konstante komponent af fluxen bruges en zigzag-forbindelse af transformatorens sekundære viklinger, hvilket også øger designeffekten noget. Det øgede niveau, krusning af den ensrettede spænding, sammen med den ovenfor nævnte ulempe, begrænser brugen af et trefaset neutralt kredsløb.
Et seksfaset reaktorkredsløb anbefales, når det bruges til lavspænding og høj strøm, fordi belastningsstrømmen i dette kredsløb flyder parallelt i stedet for i serie gennem to dioder som i et trefaset brokredsløb. Ulempen ved dette kredsløb er tilstedeværelsen af en udjævningsreaktor med en typisk effekt på omkring 70 % af den korrigerede nominelle effekt. Derudover bruges et ret komplekst transformerdesign i seksfasede kredsløb.
Ensretterkredsløb baseret på tyristorer giver drift i to tilstande - ensretter og inverter. Ved drift i invertertilstand overføres energien fra belastningskredsløbet til forsyningsnettet, det vil sige i den modsatte retning sammenlignet med ensrettertilstanden, derfor ved invertering vil strømmen og f. etc. c. transformatorens viklinger er rettet modsat, og når de er rettet - i overensstemmelse.Den aktuelle kilde i inverteringstilstand er f.eks. etc. c. belastning (DC-maskiner, induktans), der skal overstige inverterspændingen.
Overførslen af tyristorkonverteren fra ensrettertilstanden til invertertilstanden opnås ved at ændre polariteten af f.eks. etc. c. forøgelse af belastningen og vinklen α over π / 2 med en induktiv belastning.
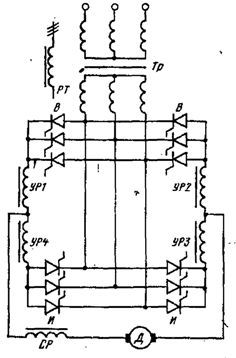
Ris. 2. Antiparallel kredsløb til indkobling af grupper af ventiler. UR1 — UR4 — nivelleringsreaktorer; RT — strømbegrænsende reaktor; CP — udjævningsreaktor.
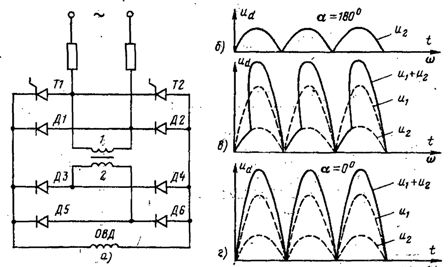
Ris. 3. Ordning af irreversibel TP for kredsløb af excitationsviklinger af motorer. For at sikre inversionstilstand er det nødvendigt, at den næste lukkende tyristor har tid til at genoprette dens blokeringsegenskaber, mens der er en negativ spænding på den, det vil sige i vinklen φ (fig. 1, c).
Hvis dette ikke sker, så kan den lukkende tyristor åbne igen, da der påføres en fremadspænding på den. Dette vil få inverteren til at vælte, hvor der vil opstå en nødstrøm, som f.eks. etc. c. DC-maskiner og transformer vil matche i retning. For at undgå en væltning er betingelsen påkrævet
hvor δ — restaureringsvinklen for tyristorens låseegenskaber; β = π — α Dette er inverterens ledningsvinkel.
Strømkredsløb af tyristorkonvertere, beregnet til at drive motorers ankerkredsløb, er lavet i både irreversible (en ensrettergruppe af tyristorer) og reversible (to ensrettergrupper) versioner. Irreversible versioner af tyristorkonvertere, der giver ensrettet ledning, tillader drift i motor- og generatortilstande i kun én retning af motorens drejningsmoment.
For at ændre retningen af momentet er det nødvendigt enten at ændre retningen af ankerstrømmen med retningen af feltfluxen konstant, eller at ændre retningen af feltfluxen, mens retningen af ankerstrømmen opretholdes.
Inverterende tyristorkonvertere har flere typer strømkredsløbsdiagrammer. Den mest almindelige er ordningen med anti-parallel forbindelse af to grupper af ventiler til en sekundær vikling af transformeren (fig. 2). Et sådant skema kan implementeres uden en separat transformer ved at føde tyristorgrupper fra et fælles vekselnetværk gennem anodestrømbegrænsere på RT-reaktorer. Overgangen til reaktorversionen reducerer størrelsen af tyristorkonverteren betydeligt og reducerer dens omkostninger.
Thyristorkonvertere til viklingskredsløb af motorfelter er hovedsageligt lavet i irreversibel konstruktion. I fig. 3a viser et af de anvendte ensretterkoblingskredsløb. Kredsløbet giver dig mulighed for at variere motorens excitationsstrøm over et bredt område. Den minimale værdi af strømmen opstår, når tyristorerne T1 og T2 er lukkede, og den maksimale, når de er åbne. I fig. 3, b, d viser arten af ændringen i ensrettet spænding for disse to tilstande af tyristorer, og i fig. 3, i for tilstanden hvornår
Kontrolmetoder til invertering af tyristorkonvertere
Ved inverterende tyristorkonvertere er der to hovedmåder at styre ventilgrupperne på - fælles og separat. Samledelse sker derimod konsekvent og inkonsekvent.
Med koordineret kontrol, skyde pulser tyristorer påføres de to grupper af ventiler på en sådan måde, at gennemsnitsværdierne af den korrigerede spænding for de to grupper er lig med hinanden. Dette leveres på betingelse

hvor av og ai — indstillingsvinklerne for grupperne af ensrettere og invertere. I tilfælde af inkonsekvent styring overstiger invertergruppens gennemsnitlige spænding spændingen i ensrettergruppen. Dette opnås under den betingelse, at

Den øjeblikkelige værdi af gruppespændingerne med fælles styring er ikke ens med hinanden på alle tidspunkter, hvilket resulterer i, at der i en lukket sløjfe (eller kredsløb) dannet af tyristorgrupper og transformerviklinger, løber en udligningsstrøm for at begrænse hvilke udligningsreaktorer UR1-UR4 er inkluderet i tyristorkonverteren (se fig. 1).
Reaktorerne er forbundet til udligningsstrømsløjfen, en eller to pr. gruppe, og deres induktans er valgt således, at udligningsstrømmen ikke overstiger 10 % af den nominelle belastningsstrøm. Når de strømbegrænsende reaktorer tændes, to pr. gruppe, mættes de, når belastningsstrømmen løber. For eksempel, under gruppe B-drift, er reaktorerne UR1 og UR2 mættede, mens reaktorerne URZ og UR4 forbliver umættede og begrænser udligningsstrømmen. Hvis reaktorerne er tændt, én pr. gruppe (UR1 og URZ), er de ikke mættede, når nyttelasten flyder.
Konvertere med inkonsekvent styring har mindre reaktorstørrelser end med koordineret styring.Men med inkonsekvent styring falder rækkevidden af tilladte styrevinkler, hvilket fører til en dårligere brug af transformeren og et fald i installationens effektfaktor Samtidig er lineariteten af kontrol- og hastighedskarakteristika for den elektriske drevet er overtrådt. Separat styring af grupper af ventiler bruges til fuldstændig at eliminere udligningsstrømme.
Separat styring består i, at styreimpulserne kun påføres den gruppe, der skulle arbejde i øjeblikket. Styreimpulser leveres ikke til ventilerne i tomgangsgruppen. For at ændre driftstilstanden for tyristorkonverteren bruges en speciel omskifteranordning, som, når tyristorkonverterens strøm er nul, først fjerner styreimpulserne fra den forrige arbejdsgruppe og derefter efter en kort pause (5- 10 ms), sender kontrolimpulser til den anden gruppe.
Med separat styring er der ikke behov for at inkludere udligningsreaktorer i kredsløbet af separate grupper af ventiler, transformeren kan bruges fuldt ud, sandsynligheden for, at inverteren vælter på grund af et fald i driftstiden for tyristorkonverteren i invertertilstand er reduceres, energitab reduceres, og følgelig øges effektiviteten af det elektriske drev på grund af fraværet af udligningsstrømme. Separat styring stiller dog høje krav til pålideligheden af apparater til blokering af styreimpulser.
Fejl i driften af blokeringsenheder og udseendet af styreimpulser på en ikke-fungerende tyristorgruppe fører til en intern kortslutning i tyristorkonverteren, da udligningsstrømmen mellem grupperne i dette tilfælde kun er begrænset af transformatorens reaktans viklinger og når en uacceptabel stor værdi.