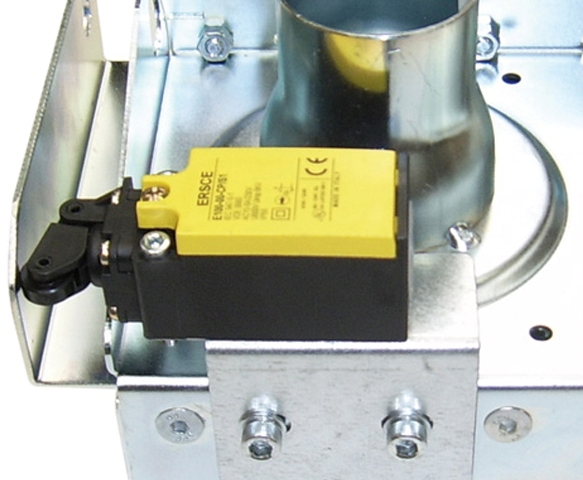
Sammenligning af kontakt- og berøringsfri rejseafbrydere
I industriel automation er kredsløb meget brugt rejse (position) kontakter og kontakter flere design designet til at kontrollere positionen af forskellige produktionsmekanismer og baseret på transformationen af disse mekanismers bevægelse i et elektrisk signal.
Positionskontakter kan også bruges til at udføre andre funktioner end positionskontrol af produktionsmekanismer, for eksempel kontrol af rotationsvinkel, niveau, vægttryk mv.

Retningskontakter er enheder med en diskret handling, der arbejder efter stigningsprincippet, det vil sige, at de kun reagerer på en ændring i positionen af den kontrollerede mekanisme. Udgangssignalet fra vejskifterne er en tvetydig funktion af mekanismens bevægelse fra en given startposition.
Typer af vejskifter
Afhængigt af principperne for positionsskifte er omskiftningsmetoden opdelt i:
-
mekanisk kontakt lavet med skiftekontakter og kontaktfølsomme elementer;
-
statisk kontakt (magnetomekanisk), hvis følsomme element er ikke-kontakt, og omskifterelementet er en kontakt;
-
statiske kontaktløse, følsomme og koblingselementer, hvoraf kontaktløse er lavet.
I kontaktkarakteren af "switching - stop" noden, det vil sige i kontaktarten af forbindelsen af drivelementet (indgangskontrolsignal) med det følsomme element, kaldes denne node mekanisk og i ikke-kontakt - statisk .
Afhængigt af designet kan kontakter kombineres eller adskilles. I det første tilfælde er de følsomme og skiftende elementer placeret i et hus og er strukturelt udført som en helhed. I den anden kan det følsomme element være placeret i en afstand af flere ti- og hundrede meter fra kontakten.
Forvrængning af det magnetiske felt af vejkontakten opnås ved at ændre parametrene magnetisk kredsløb følsomt element. Variable parametre kan også være det aktive overfladeareal og størrelsen af luftspalten magnetisk permeabilitet magnetisk kredsløb.
I øjeblikket er anvendelsesområdet for mekaniske kontaktpositionsafbrydere i industriel automation ved at blive indsnævret, og spørgsmålet opstår om ubrugeligheden af positionsafbrydere af denne type med henblik på at bygge automatiske styresystemer.
Sidstnævnte er forårsaget af følgende:
-
Kompleksiteten af designet af switch-stop-enheden på grund af strengheden af kravene til grænserne for tilladte udsving af en række parametre, hvilket forårsager betydelige vanskeligheder ved fremstilling og justering.
-
Den relativt høje kritik af nøjagtighedsegenskaberne for denne enhed til påvirkningen af destabiliserende faktorer (slid på kontaktflader, løshed af fastgørelseselementer, fejljustering af bevægelige elementer osv.).
En række designløsninger af mekanismer kan slet ikke implementeres baseret på mekaniske kontaktkontakter. Disse omfatter mekanismer, der kræver høje tilladte niveauer af hastighed og frekvens af bevægelseskontakter.
Hvis den krævede hastighed af betjeningen af vejkontakten kan reduceres på grund af yderligere kinematiske forbindelser af mekanismen, som blandt andet forringer kontrolsystemets kvalitetsegenskaber (især nøjagtighedsparametre), så er den tilladte driftsfrekvens ( opløsning) ikke kan øges af strukturelle komplikationer.
Se også: Montering af endestop og kontakter
Hvad er i dette tilfælde årsagen til den udbredte brug af det mekaniske kontaktprincip for positionsskift? Svaret på dette spørgsmål skal søges i to aspekter: i de eksisterende principper for konstruktion af automatiske kontrolsystemer og i fordelene ved kontaktvejskontaktkredsløbet.
Fordele ved kontaktvejskontakter
Mekaniske kontaktkontakter, normalt implementeret med en multi-kredsløbsudgang, er kendetegnet ved følgende fordele:
-
højt skifteforhold;
-
høj specifik kontroleffekt (forholdet mellem den inkluderede effekt og de overordnede dimensioner);
-
universalitet, det vil sige evnen til at skifte både jævnstrøm og vekselstrømkredsløb;
-
stort udvalg af inkluderede spændinger;
-
ubetydeligt internt energiforbrug (lille værdi af transient modstand af kontakterne i lukket tilstand);
-
lav afhængighed af nøjagtighed og driftsstabilitet af ændringer i kontrolleret effekt.
Ulemper ved kontaktvejskontakter
Princippet om mekanisk kontakt af disse enheder tillader ofte ikke at opfylde de øgede krav til pålidelighed, holdbarhed og nøjagtighed af automatiseringssystemer. Derudover er mekaniske kontaktkontakter meget følsomme over for virkningerne af forskellige klimatiske faktorer (især ved lave temperaturer).
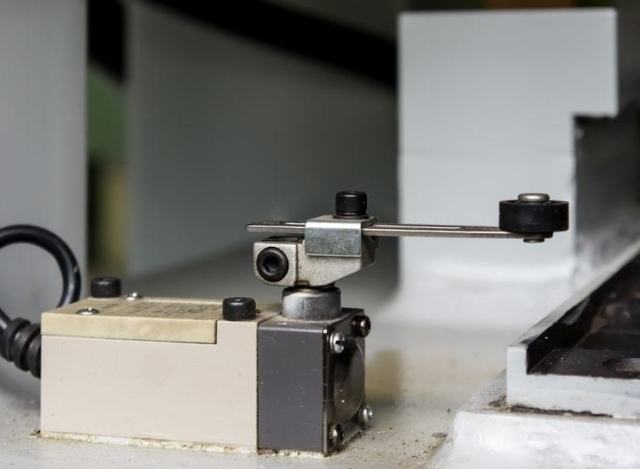
Mekaniske kontaktkontakter er kendetegnet ved begrænsede tilladte niveauer af maksimal og minimal bevægelseshastighed af skiftestoppet, som er i området 0,3 - 30 m / min, og en forøgelse af hastigheden af kontaktstoppet over det tilladte niveau fører til et kraftigt fald i mekanisk holdbarhed på kontakten.
I sådanne kontakter er de tilladte afvigelser af koblingskraftens virkningsretning i forhold til håndtagets akse meget små, og overskridelse af dem fører til mekanisk skade, især i kontakter med en forreste trækstang.
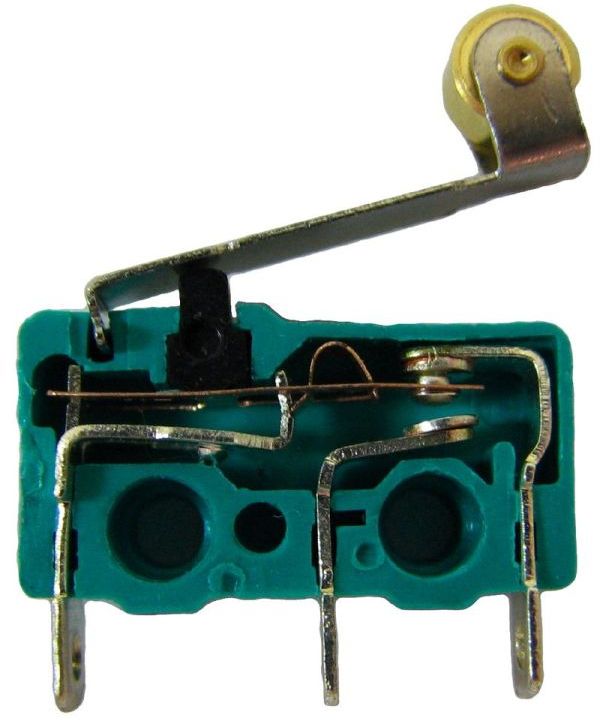
For at opnå relæudgangskarakteristika (kontrolkarakteristika) er trigger-fjederanordninger tilvejebragt i designet af sådanne kontakter. Den nødvendige grad af relæudgangsegenskaber opnås på bekostning af en betydelig reduktion i kontaktens holdbarhed på grund af de store dynamiske spændinger, der forekommer i udløseren på aktiveringstidspunktet.
I mekaniske momentane kontaktkontakter når bredden af hysteresesløjfen (slagdifferential) af outputkarakteristikken en betydelig værdi, hvilket er fuldstændig uacceptabelt for en række teknologiske processer på grund af en uproduktiv stigning i behandlingscyklussens varighed.
At reducere forskellen i disse gearskifters vandring er relateret til enten at øge kompleksiteten af deres design eller øge deres størrelse. Derudover kræves der i nogle tilfælde betydelige mekaniske kræfter for at aktivere mekaniske kontaktkontakter.
Fordele og ulemper ved nærhedsafbrydere
De ovennævnte omstændigheder fører til behovet for at udvikle enheder, der er blottet for de nævnte ulemper og samtidig er i stand til at udføre lignende funktioner. Sådanne enheder er nærhedsafbrydere, hvis fordele omfatter:
-
betydelig holdbarhed med høj pålidelighed og høj tilladt driftsfrekvens;
-
intet behov for mekanisk indsats ved aktivering, lav følsomhed over for vibrationer, acceleration osv.;
-
ubetydelig følsomhed af parametre over for ændringer i en relativt bred vifte af eksterne forhold;
-
forbedring af vilkårene for operationelle tjenester.
På grund af det lave niveau af tilbagekobling af nærhedsafbryderen opnås en betydelig forenkling af stopkontaktens konstruktion, samtidig med at en høj stabilitet over tid af nøjagtighedsegenskaberne opretholdes. Derudover sikrer fraværet af elektriske og mekaniske kontakter brand- og eksplosionssikkerhed af disse enheder, hvilket betydeligt udvider området for deres mulige anvendelse.
En af de væsentlige ulemper ved kontaktløse endestopkontakter er kompleksiteten ved at implementere mange designændringer, der let implementeres i mekaniske kontaktendestopkontakter.
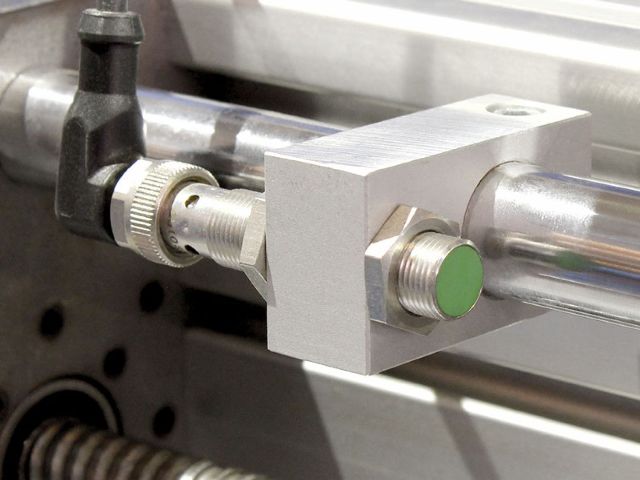
Nærhedsafbryderenhed
Funktionsprincippet for statiske berøringsfri vejafbrydere af den parametriske type er baseret på brugen af forvrængning af det magnetiske eller elektriske felt skabt af det følsomme element, når et drivelement vises i dets område, som et resultat af en ubalanceret tilstand opstår i kontaktens elektriske kredsløb, og udgangsenheden udløses.
Statiske nærhedskontakter er oftest lavet med et enkelt udgangskredsløb, og i nogle kontakter ledsages aktiveringen af et signal ved udgangen (direkte koblingseffekt), i andre - ved forsvinden (omvendt koblingseffekt), hvilket svarer til til henholdsvis lukning og åbningskontakter af de mekaniske kontaktbaner.
Hvis der er et forstærkerelement i relæ-mode nærhedsafbryderkredsløbet, kan udgangsparameteren for følerelementet være i kontinuerlig funktionel afhængighed af den kontrollerede bevægelse.
I øjeblikket anvendes adskillige designmodifikationer af berøringsfri rejseafbrydere, der adskiller sig i niveauet af følsomhed (størrelsen af arbejdsgabet), placeringen af spalten eller planet af det følsomme element i forhold til monteringsplanet, retningen af de førende ledninger, antallet af trin af følerelementet (til design med slidser), dybden af slidsen, længden af forbindelsesledningerne, niveauet af forsyningsspændingen, arten af beskyttelsen mod miljøpåvirkninger osv.
Mulighederne for at bruge kontaktløse bevægelsesafbrydere bestemmes af parametrene for deres elektriske og mekaniske egenskaber.
Elektriske parametre omfatter:
- arten af udgangssignalet og antallet af udgangskredsløb;
- forbrug og udgangseffekt;
- udgangssignalets form; omskiftningskoefficient for modstand og spænding (for omskiftere af transformertype);
- timingkarakteristika (trigger- og udløsningstider) og affyringsfrekvens (opløsning);
- forsyningsspændingens niveauer og form, samt de tilladte grænser for deres afvigelser.
Mekaniske præstationsparametre omfatter:
- følsomhed (størrelsen på arbejdsgabet),
- dimensioner og tilslutningsmål;
- nøjagtighedskarakteristika (større og yderligere fejl) og slagforskel;
- installationskarakteristika (typer af skiftebremser og hvordan de er installeret, niveauet af feedback, hvordan man monterer og installerer kontakten);
- støjbeskyttelsesniveauet.
For mere information om Proximity Switch-enheden og switches se her: Berøringsfri sensorer til placering af mekanismer
Ivenski Yu. N.Kontaktløse rejsekontakter i industriel automation