Berøringsfri sensorer til placering af mekanismer
 I denne artikel vil vi tale om positionssensorer af mekanismer. Grundlæggende er enhver sensors hovedfunktion at give et signal, når en bestemt hændelse opstår. Det vil sige, at når en triggerhændelse opstår, aktiveres sensoren og genererer et signal, som kan være analogt eller diskret, digitalt.
I denne artikel vil vi tale om positionssensorer af mekanismer. Grundlæggende er enhver sensors hovedfunktion at give et signal, når en bestemt hændelse opstår. Det vil sige, at når en triggerhændelse opstår, aktiveres sensoren og genererer et signal, som kan være analogt eller diskret, digitalt.
Grænsesensorer er blevet brugt som positionssensorer i mange årtier. skifter. De består af elektriske kontakter, der mekanisk åbner eller lukker, når en eller anden variabel (position) når en bestemt værdi. Grænseafbrydere af forskellige typer er en vigtig del af mange kontrolsystemer, hvis pålidelighed afhænger af dem. sådanne sensorer indeholder bevægelige mekaniske elementer, hvis ressourcer er begrænsede.
Grænseafbrydere bliver i øjeblikket aktivt erstattet af forskellige nærhedssensorer. Oftest nærhedssensorer af følgende typer: induktive, generator, magnetohercon og fotoelektronisk. Disse sensorer har ingen mekanisk kontakt med det bevægelige objekt, hvis position overvåges.
Berøringsfri positionssensorer sikrer høj hastighed og høj frekvens af tænding af mekanismen. En vis ulempe ved disse sensorer er afhængigheden, deres nøjagtighed, af ændringer i forsyningsspænding og temperatur. Afhængigt af kravene kan outputenheden for disse enheder være som følger kontaktløst logikelementog elektrisk relæ.
I præcisionsbremsesystemer for elektriske drev kan nærhedssensorer bruges både til at beordre en nedgearing og et endeligt stop.
Der er mange typer sensorer på markedet i dag, men inden for rammerne af denne artikel vil vi fremhæve emnet direkte induktive positionssensorer, da det i mere end 80% af tilfældene er induktive sensorer, der tjener som sensorer til positionering af mekanismer.
Den induktive sensor udløses, når metallet nærmer sig sin triggerzone. Af denne grund kaldes induktive positionssensorer også tilstedeværelsessensorer, nærhedssensorer eller blot induktive kontakter.
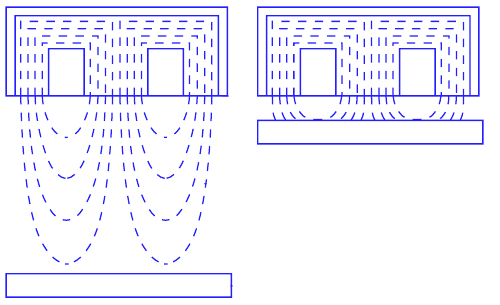
Lad os nu overveje princippet om drift af en induktiv sensor. Som nævnt ovenfor, når metallet er tæt nok på triggerzonen, aktiveres sensoren. Dette fænomen består i samspillet mellem de involverede induktorer med metal, der nærmer sig det, hvilket kraftigt ændrer størrelsen af spolens magnetiske felt, hvilket fører til aktivering af sensoren, udløses det, det tilsvarende signal vises ved dets udgang.
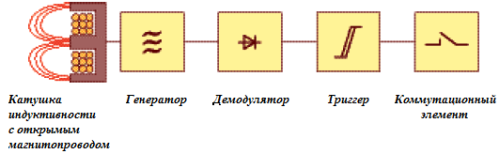
Den elektroniske del af enheden indeholder et styrekredsløb, som igen styrer en relæ- eller transistorkontakt. Den består af følgende dele:
-
En generator, der skaber et elektromagnetisk felt, der er nødvendigt for at interagere med et objekt.
-
Schmitt-trigger giver skiftehysterese.
-
En forstærker til at øge amplituden af signalet, så det når den nødvendige aktiveringsværdi.
-
LED-indikator, der informerer om kontaktens status. Det giver også præstationsovervågning og konfiguration.
-
Forbindelse til beskyttelse mod indtrængning af faste partikler og vand.
-
Hus til montering af sensoren og beskyttelse mod diverse mekaniske påvirkninger.Den er lavet af messing eller polyamid og er afsluttet med fastgørelseselementer.
Induktive positionssensorer er meget udbredt i industrielle automationssystemer, hvor det er nødvendigt periodisk eller konstant at bestemme positionen af enhver del af mekanismen. Sensoren genererer et signal, der sendes til drevet. En starter, controller, relæ, frekvensomformer osv. kan fungere som en udøvende mekanisme. Det vigtigste er, at sensorens parametre svarer til frekvensomformerens parametre med hensyn til spænding og strøm.
De fleste af sensorerne er ikke strømenheder, de er primært signalanordninger, derfor skifter sensoren selv som regel ikke noget kraftigt, men kun kontrollerer, giver et styresignal, fungerer som en handlingsinitieringsenhed, der allerede kan tilsluttes til strømskifte.
Moderne induktive positionssensorer findes oftest i to versioner af plast- eller metalhuse: rektangulære eller cylindriske. Diameteren af sensoren med et cirkulært tværsnit kan være fra 4 til 30 mm, men de mest almindeligt anvendte diametre er 18 og 12 mm.
Når sensoren er monteret på udstyr, indstilles et mellemrum mellem metalpladen og sensorens aktiveringszone, normalt overstiger denne afstand ikke sensorens diameter og viser sig som regel at være 2-3 gange mindre end dens diameter.
Ifølge tilslutningsmetoden kan induktive positionssensorer være to-leder, tre-leder, fire-leder og fem-leder.
To-leder omskifter belastningen direkte, som f.eks startspole, det vil sige, at de fungerer som en konventionel switch. To-trådssensorer kræver belastningsmodstand, så de er ikke altid egnede som et pålideligt værktøj, men de mister ikke deres relevans.
Belastningen er simpelthen forbundet i serie med sensoren, hvis der bruges konstant spænding, er det vigtigt at observere polariteten, hvis vekslende polaritet ikke er vigtig, er det vigtigste den skiftede effekt og strøm.
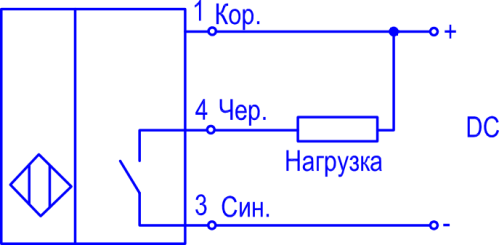
Tre-leder sensorer har en tredje ledning til at drive selve sensoren, og dette er den mest populære løsning. Firetråds- og femtrådssensorer har transistor- eller relæudgange til tilslutning af belastningen, og den femte ledning giver dig mulighed for at vælge sensorens driftstilstand, udgangenes begyndelsestilstand.
Da udgangene kan være både relæ og transistor, er sensorerne i overensstemmelse hermed opdelt i tre typer alt efter udgangenes enhed: relæ, npn og pnp.
Sensorer med relæudgang
En sensor med relæudgang har galvanisk isolering af forsyningskredsløbet fra det medfølgende kredsløb. Den skifter en ledning, og spændingen i det koblede kredsløb er ikke særlig kritisk. Da sensorens strømforsyningskredsløb er galvanisk isoleret, kan dette betragtes som en fordel ved relæføleren. Sensorer af denne type er normalt store.
Sensorer med pnp transistorudgang
Sensoren har en pnp-transistor ved udgangen, som kommuterer den positive ledning med belastningen. En belastning er forbundet til kollektorkredsløbet på udgangs-pnp-transistoren, som er permanent forbundet til negativ gennem sin anden ledning.
Sensorer med npn transistorudgang
Sensoren har en NPN-transistor ved udgangen, som kommuterer den negative ledning med belastningen. En belastning er forbundet til kollektorkredsløbet af output npn transistoren, som er permanent forbundet med sin anden ledning til den positive ledning.
Afhængigt af udgangenes begyndelsestilstand kan induktive positionssensorer være normalt lukkede eller normalt åbne kontakter. Starttilstanden betyder, at denne tilstand er i det øjeblik, hvor sensoren endnu ikke er udløst, dvs. den er ikke aktiveret.
Hvis udgangskontakterne normalt er lukkede, så tilsluttes belastningen ved tomgang, hvis den er normalt åben, så indtil sensoren udløses, vil belastningen blive afbrudt, og der vil ikke blive leveret strøm til drevet (f.eks. kontaktor). Normalt lukkede kontakter er angivet i engelsk format - N.C. (Normalt lukket), Normalt Åben — N.O. (Normalt åben).
Således er sensorer med transistorudgange af fire typer: to typer i henhold til ledningsevnen (pnp eller npn) og to typer i henhold til udgangenes begyndelsestilstand. Der kan også være en forsinkelse, når du tænder eller slukker.

Afhængigt af typen af drev, der er forbundet til sensoren, samt strømforsyningsmetoden, kan sensorens logik være positiv eller negativ. Dette skyldes det spændingsniveau, der aktiverer enhedens indgang.
Hvis indgangen aktiveres, når den negative ledning af aktuatoren er forbundet til jorden, til minus, kaldes logikken negativ, en sådan forbindelse er karakteristisk for sensorer med npn-type transistorudgange.
Positiv logik svarer til at forbinde drevets positive ledning til den positive strømforsyning, når den er aktiveret, denne logik er typisk for sensorer med pnp transistorudgange. Oftest er der en positiv logik til driften af induktive sensorer for positionen af mekanismerne.
Ældre mest almindeligt anvendte typer af induktive positionssensorer
Induktive positionssensorer IKV-22
Induktive sensorer IKV-22. Driften af disse sensorer er baseret på princippet om at ændre den induktive modstand af spoler med en stålkerne, når luftgabet i det magnetiske kredsløb ændres.
Et magnetisk kredsløb med to spoler er monteret på en stålplade, lukket med et plastikdæksel. To MBGP-kondensatorer (en med en kapacitet på 15 μF, 200 V, den anden med en kapacitet på 10 μF, 400 V) er fastgjort til pladen fra undersiden. Kondensatorerne er dækket af et låg. Kablet er forbundet gennem tætningen. En magnetisk shunt er installeret på mekanismen, hvis dimensioner skal være mindst: tykkelse 2 mm, bredde 80 mm, længde 140 mm. Luftspalten mellem det magnetiske kredsløb og shunten er 6 ± 4 mm.
Udgangsrelæet tændes og slukkes normalt i det øjeblik, hvor den magnetiske shunt passerer gennem sensoren, når der på grund af en ændring i spolens induktive modstand opstår strømresonans, og strømmen gennem relæspolen falder. Disse relæer: type MKU-48, 12 V AC, trække strøm ikke mere end 0,45 A, fald strøm ikke mindre end 0,1 A.Forsyningsspændingen til sensorkredsløbet er 24 V AC relæ.
Induktive positionssensorer ID-5
I metallurgiske værksteder bruges induktive sensorer af ID-5-typen, designet til at arbejde ved omgivelsestemperaturer op til + 80 ° C og luftfugtighed op til 100%. Ledende støv og kalk er acceptable. En halvlederudgangsforstærker af typen UID-10 bruges sammen med sensoren. Forstærkerens udgangseffekt (25 W) er tilstrækkelig til at tænde for de udbredte REV-800-relæer, kontaktorer KP21, MK-1 osv.
Luftspalten mellem sensoren og det observerede ferromagnetiske objekt kan være op til 30 mm. Dimensionerne på ID-5 sensoren er 187x170x70 mm, forsyningsspændingen er 220 V ± 15%, 50 Hz.
Lille størrelse BSP kontaktløse kontakter
Små bevægelsesafbrydere BSP-2 (med berøringsfri udgang, til logisk element) og BRP (med udgang til relæ PE-21, 24 V, 16 Ohm) bruges på metalskæremaskiner.
BSP-2-kontakten består af en differentialtransformatorsensor og en halvledertrigger. Det magnetiske system af den første sensorspole bevæges af en stålplade, og den anden spole manipuleres, når den bevæger sig over dets magnetiske system forbundet med den flade ankermekanisme. Spolerne tændes i den modsatte retning.
Hvis ankeret er over sensoren, er spolernes induktive reaktanser ens, og differentialtransformatorens sensorudgang er nul. I dette tilfælde vises en spænding på mindst 2,5 V ved udgangen af udløseren, hvilket er nok til, at det logiske element fungerer.
I mangel af et armatur over sensoren påføres en spænding til udløseren, som returnerer den til sin oprindelige tilstand. Så er udgangssignalet fra kontakten nul.
Funktionsprincippet for BRP-switchen ligner på mange måder BSP-2. En induktiv sensor (i henhold til differentialtransformatorens kredsløb), en trigger og en forstærker er installeret inde i kassen. Sekundære spoler med et andet antal vindinger tændes i den modsatte retning. Da ankeret overlapper sensorens magnetiske system, falder signalet, og efter faseskift kobles udløseren, og et eksternt udgangsrelæ (PE-21, 24 V, 16 Ohm) aktiveres.
Ankeret fastgjort til mekanismen har dimensioner på 80x15x3 mm. Mellemrummet mellem anker og sensor er 4 mm. Nøjagtigheden af kontakterne i den nominelle tilstand er ± 0,5 mm, aktiveringsdifferensen er ikke mere end 5 mm. På. udsving i forsyningsspænding og temperatur, fejlen i BSP-2 og BRP switches kan nå ± (2,5-f-3,0) mm.
Højfrekvente induktive sensorer VKB
Højpræcisions induktive sensorer af VKB-typen med U-formet eller fladt armatur bruges også til automatisering af metalskæremaskiner. Polerne på den indbyggede transformator danner et åbent elektromagnetisk system. Arbejdsluftspalten er 0,1-0,15 mm.
Udgangsspændingen fra transformatorens sekundære vikling føres til et differentialmålekredsløb og derefter til en transistorforstærker. Sensorens samlede fejl med temperatursvingninger fra 5 til 40 ° C og spænding fra 85 til 110% af den nominelle værdi er ± (0,064-0,15) mm, forskellen i respons overstiger ikke 0,4 mm. Mekanismens maksimale bevægelseshastighed er 10 m / mm. Følermål 62x34x24 mm. Forsyningsspænding 12 V.
Specielle typer af præcisionsinduktive sensorer til metalskæremaskiner med et differentialkredsløb har en fejl på mindre end ± 0,01 mm.Sådanne sensorer omfatter en berøringsfri bevægelsesafbryder af typen VPB12, der består af en sensorenhed på en elektronisk enhed. Sensorenheden omfatter en induktiv arbejdssensor, en induktiv kompensationssensor og printkort. Mekanismen er monteret: kontrol ferritelement. Forsyningsspænding 12 V DC. Den maksimale eksponeringsafstand er ikke mere end 0,12 mm. Et RPU-0 type relæ kan tilsluttes til sensorudgangen. Den maksimale belastningsstrøm for outputenheden er 0,16 A.
Generatorpositionssensorer
Sensorer af denne type er kompakte og meget nøjagtige. Sensorgeneratorer i KVD-6M- og KVD-25-serien (med slots), KVP-8 og KVP-16 (fly) har vist sig godt. De er velegnede til brug i høje koncentrationer af fugt og støv. Elementerne i sensorens transistorkredsløb (generator og trigger) er placeret i et hus lavet af stødfast polystyren. Forsegling udføres med en koldhærdende masse. Driftstemperaturområdet er fra - 30 til +50 ° C.
HPC-sensoren genererer et diskret signal, når en metalplade ("flag") passerer gennem spalten, hvilket forårsager et sammenbrud i genereringen og skiftet af triggeren. Bredden af slidsen er 6 mm for KVD-6M-sensoren og 25 mm for KVD-25-sensoren.
KVP-8- og KVP-16-sensorerne aktiveres, når en metalplade passerer dem med en maksimal afstand på henholdsvis 8 og 16 mm.