Synkronmaskiner — motorer, generatorer og kompensatorer
 Synkronmaskiner er elektriske vekselstrømsmaskiner, hvor rotoren og statorstrømmenes magnetfelt roterer synkront.
Synkronmaskiner er elektriske vekselstrømsmaskiner, hvor rotoren og statorstrømmenes magnetfelt roterer synkront.
Trefasede synkrongeneratorer er de mest kraftfulde elektriske maskiner. Enhedseffekten af synkrone generatorer på vandkraftværker er 640 MW, og ved termiske kraftværker - 8 - 1200 MW. I en synkronmaskine er den ene af viklingerne forbundet til et vekselstrømsnet, og den anden exciteres af DC. Vekselstrømsviklingen kaldes ankerviklingen.
Armaturviklingen konverterer al den elektromagnetiske kraft fra synkronmaskinen til elektrisk strøm og omvendt. Derfor placeres den normalt på en stator, som kaldes en armatur. Excitationsspolen bruger 0,3 - 2% af den konverterede effekt, derfor er den normalt placeret på en roterende rotor, som kaldes en induktor, og den lave excitationseffekt leveres af slæberinge eller berøringsfri magnetiseringsanordninger.
 Armaturmagnetfeltet roterer med en synkron hastighed n1 = 60f1 / p, rpm, hvor p = 1,2,3 … 64 osv. er antallet af polpar.
Armaturmagnetfeltet roterer med en synkron hastighed n1 = 60f1 / p, rpm, hvor p = 1,2,3 … 64 osv. er antallet af polpar.
Med industriel netværksfrekvens f1 = 50 Hz, et antal synkrone hastigheder ved forskellige antal poler: 3000, 1500, 1000 osv.). Da induktorens magnetfelt er stationært i forhold til rotoren, skal rotoren rotere med samme synkrone hastighed for den kontinuerlige vekselvirkning af felterne i induktoren og ankeret.
 Konstruktion af synkronmaskiner
Konstruktion af synkronmaskiner
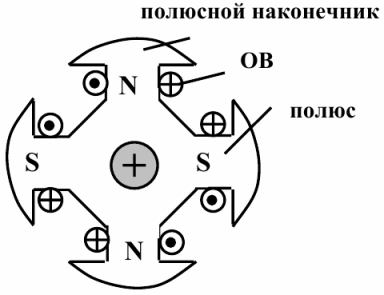
Statoren af en synkron maskine med en trefaset vikling adskiller sig ikke i konstruktion asynkron maskinstator, og rotoren med en spændende spole er af to typer - fremtrædende pol og implicit pol. Ved høje hastigheder og et lille antal poler anvendes implicit-pol-rotorer, fordi de har en mere holdbar struktur, og ved lave hastigheder og et stort antal poler anvendes salient-pol-rotorer af modulær opbygning. Styrken af sådanne rotorer er mindre, men de er lettere at fremstille og reparere. Tilsyneladende polrotor:
 De bruges i synkronmaskiner med et stort antal poler og en tilsvarende lav n. Vandkraftværker (hydrogeneratorer). frekvens n fra 60 til flere hundrede omdrejninger pr. minut. De mest kraftfulde hydrogeneratorer har en rotordiameter på 12 m med en længde på 2,5 m, p - 42 og n = 143 rpm.
De bruges i synkronmaskiner med et stort antal poler og en tilsvarende lav n. Vandkraftværker (hydrogeneratorer). frekvens n fra 60 til flere hundrede omdrejninger pr. minut. De mest kraftfulde hydrogeneratorer har en rotordiameter på 12 m med en længde på 2,5 m, p - 42 og n = 143 rpm.
Indirekte rotor:
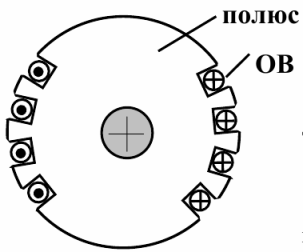 Vinding — diameter d = 1,2 — 1,3 m i rotorkanalerne, rotorens aktive længde er ikke mere end 6,5 m. TPP, NPP (turbinegeneratorer). S = 500.000 kVA i én maskine n = 3000 eller 1500 rpm (1 eller 2 polpar).
Vinding — diameter d = 1,2 — 1,3 m i rotorkanalerne, rotorens aktive længde er ikke mere end 6,5 m. TPP, NPP (turbinegeneratorer). S = 500.000 kVA i én maskine n = 3000 eller 1500 rpm (1 eller 2 polpar).
Udover feltspolen er der på rotoren placeret et spjæld eller dæmpningsspole, som bruges til start i synkronmotorer. Denne spole er lavet i lighed med en kortslutningsspole for egernbur, kun af en meget mindre sektion, da rotorens hovedvolumen optages af feltspolen.I ikke-ensartede polrotorer spilles spjældviklingens rolle af overfladerne af rotorens faste tænder og de ledende kiler i kanalerne.
Jævnstrøm i excitationsviklingen af en synkron maskine kan leveres fra en speciel DC-generator installeret på maskinens aksel og kaldet exciteren, eller fra lysnettet gennem en halvlederensretter.  Se også om dette emne:
Se også om dette emne:
Formål og arrangement af synkronmaskiner
Sådan fungerer synkrone turboer og hydrogeneratorer
En synkronmaskine kan fungere som en generator eller en motor. En synkronmaskine kan fungere som motor, hvis der tilføres trefaset netstrøm til statorviklingen. I dette tilfælde, som et resultat af interaktionen mellem stator- og rotormagnetfelterne, bærer statorfeltet rotoren med sig. I dette tilfælde roterer rotoren i samme retning og med samme hastighed som statorfeltet.

Generatordriftsmåden for synkronmaskiner er den mest almindelige, og næsten al elektrisk energi genereres af synkrongeneratorer Synkronmotorer bruges med effekt over 600 kW og op til 1 kW som mikromotorer. Synkrone generatorer til spændinger op til 1000 V bruges i enheder til autonome strømforsyningssystemer.
Enheder med disse generatorer kan være stationære og mobile. De fleste enheder bruges med dieselmotorer, men de kan drives af gasturbiner, elmotorer og benzinmotorer.
En synkronmotor adskiller sig kun fra en synkrongenerator ved en startdæmpningsspole, som skal sikre motorens gode startegenskaber.
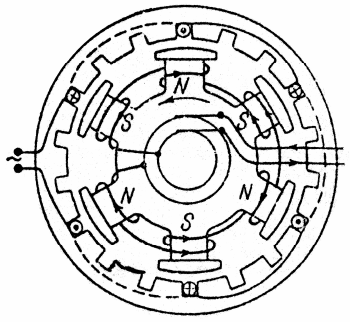
Skema af en seks-polet synkron generator.Tværsnit af viklingerne af en fase (tre serieforbundne viklinger) er vist. Vindingerne af de to andre faser passer ind i de frie slidser vist på figuren. Faserne er forbundet i stjerne eller trekant.
Generatortilstand: motoren (turbinen) roterer rotoren, hvis spole forsynes med konstant spænding? der er en strøm, der skaber et permanent magnetfelt. Magnetfeltet roterer med rotoren, krydser statorviklingerne og inducerer en EMF af samme størrelse og frekvens, men forskudt med 1200 (symmetrisk trefasesystem).
Motortilstand: statorviklingen er forbundet til et trefaset netværk, og rotorviklingen til en jævnstrømskilde. Som et resultat af interaktionen af maskinens roterende magnetfelt med excitationsspolens jævnstrøm opstår et drejningsmoment Mvr, som driver rotoren til at rotere med magnetfeltets hastighed.
Mekanisk karakteristik af en synkronmotor — afhængighed n (M) — er et vandret snit.
Educational Filmstrip - "Synchronous Motors" produceret af Educational Materials Factory i 1966.
Du kan se den her: Filmstrip «Synchronous Motor»
 Anvendelse af synkronmotorer Massebrugen af asynkronmotorer med en betydelig underbelastning komplicerer driften af kraftsystemer og stationer: effektfaktoren i systemet falder, hvilket fører til yderligere tab i alle enheder og linjer, samt til deres utilstrækkelige brug i udtryk for aktiv effekt. Derfor blev brugen af synkronmotorer nødvendig, især for mekanismer med kraftige drev.
Anvendelse af synkronmotorer Massebrugen af asynkronmotorer med en betydelig underbelastning komplicerer driften af kraftsystemer og stationer: effektfaktoren i systemet falder, hvilket fører til yderligere tab i alle enheder og linjer, samt til deres utilstrækkelige brug i udtryk for aktiv effekt. Derfor blev brugen af synkronmotorer nødvendig, især for mekanismer med kraftige drev.
Synkronmotorer har en stor fordel i forhold til asynkronmotorer, hvilket er, at de takket være DC-excitering kan arbejde med cosphi = 1 og ikke forbruger reaktiv effekt fra netværket, og under drift, når de overexciteres, giver de endda reaktiv effekt til netværk. Som et resultat forbedres netværkets effektfaktor, og spændingsfaldet og tabene i det reduceres såvel som effektfaktoren for de generatorer, der arbejder i kraftværker.
Det maksimale drejningsmoment for en synkronmotor er proportional med U, og for en asynkronmotor U2.
Derfor, når spændingen falder, bevarer synkronmotoren en højere belastningskapacitet. Derudover gør brugen af muligheden for at øge excitationsstrømmen af synkronmotorer det muligt at øge deres pålidelighed i tilfælde af nødspændingsfald i netværket og at forbedre i disse tilfælde driftsforholdene for elsystemet som helhed. På grund af luftgabets større størrelse er de yderligere tab i stålet og i rotorhuset på synkronmotorer mindre end dem for asynkronmotorer, derfor er effektiviteten af synkronmotorer normalt højere.
På den anden side er konstruktionen af synkronmotorer mere kompliceret end egern-bur-induktionsmotorer, og derudover skal synkronmotorer have en exciter eller anden enhed for at forsyne en DC-spole. Som følge heraf er synkronmotorer i de fleste tilfælde dyrere end asynkrone egern-burmotorer.
Under driften af synkronmotorer opstod der betydelige vanskeligheder med at starte dem.Disse vanskeligheder er allerede overvundet.

Start og hastighedskontrol af synkronmotorer er også vanskeligere. Fordelen ved synkronmotorer er dog så stor, at det ved høje ydelser er tilrådeligt at bruge dem overalt, hvor hyppige starter og stop og hastighedsregulering ikke er påkrævet (motorgeneratorer, kraftige pumper, ventilatorer, kompressorer, møller, knusere osv.). ).
Se også:
Typiske ordninger til start af synkronmotorer
Elektromekaniske egenskaber af synkronmotorer
Synkrone kompensatorer
Synkrone kompensatorer er designet til at kompensere netværkets effektfaktor og opretholde netværkets normale spændingsniveau i områder, hvor forbrugerbelastningen er koncentreret. Den overspændte driftstilstand for den synkrone kompensator er normal, når den leverer reaktiv effekt til nettet.
I denne henseende kaldes kompensatorer såvel som kondensatorbanker, der tjener de samme formål, installeret på forbrugertransformatorstationer, også reaktive strømgeneratorer. Men i perioder med reduceret brugerbelastning (for eksempel om natten) er det ofte nødvendigt at bruge synkrone kompensatorer og i underexcitationstilstand, når de forbruger induktiv strøm og reaktiv effekt fra netværket, da netværksspændingen i disse tilfælde har en tendens til at stigning, og for at opretholde det på et normalt niveau, er det nødvendigt at belaste netværket med induktive strømme, hvilket forårsager yderligere spændingsfald i det.
Til dette formål er hver synkron kompensator udstyret med en automatisk magnetiserings- eller spændingsregulator, som regulerer størrelsen af magnetiseringsstrømmen, så spændingen ved kompensatorens terminaler forbliver konstant.