Elektrisk udstyr til savværker
 På savværker er hovedudstyret til at skære rundtømmer til brædder, bjælker og andre sortimenter hovedudstyret til savværker.
På savværker er hovedudstyret til at skære rundtømmer til brædder, bjælker og andre sortimenter hovedudstyret til savværker.
Savrammen er en multisavmaskine med savene udspændt i en stiv ramme. Lodrette savværker fremstilles i enkelt- og dobbeltdæk, smalle og brede åbninger, med jogging og kontinuerlig fodring. De seneste savværksrammer har mellem tre og seks elmotorer. Krumtapakslens rotationshastighed - fra 200 til 600 min–1, drevet udføres af en asynkronmotor med en viklet rotor og nogle gange af en egern-burrotormotor.
På savens ramme (fig. 1) skæres træstammer med en længde på 3,2-9 m og en diameter på 65 cm i pandesnittet. Rammens støbejernsramme består af to ben og sidevægge forbundet med hinanden ved tværgående forbindelser.
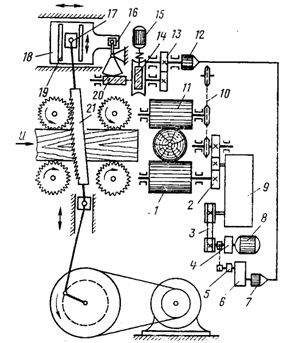
Ris. 1. Kinematisk diagram af savværksrammen
Rammen på savværket er monteret på en bundplade. En krumtapaksel med to svinghjul og en drivremskive roterer i to hovedlejer monteret på en plade.I-bjælkens plejlstang er forbundet med det nederste hoved til krumtapakseltappen gennem et rulleleje, og det øverste hoved er forbundet med tappen gennem savrammens nederste tværstang gennem nålelejet.
Savrammens nedre og øvre tværstykker er forbundet med runde rørformede understøtninger. Tekstolitskyderne med stifter på savrammens tværstykker er forbundet med koniske rullelejer.
Savrammens design tillader brug af en hydraulisk strammer. Af dens otte guider er fire prismatiske og fire flade, som parvis er fastgjort til støbejernsplader monteret på sengen. De øverste styreplader er monteret på en slæde og bevæges af savrammens vippemekanisme, afhængigt af størrelsen af plottet Δ.
Det individuelle drev af den fire-valsede fremføringsmekanisme, bestående af et tyristordrev, sikrer en jævn justering af træfremføringshastigheden. Drejningsmomentet overføres til de nederste ruller 1 fra motoren 8 gennem en elektromagnet, en elektromagnetisk kobling 4, en remtransmission 3, en gearkasse 9 og gear 2. De øvre ruller 11 roterer gennem en rullekæde 10.
Størrelsen af pakkerne justeres ved at ændre glideren på den elektromagnetiske kobling 4, udført ved at dreje skiven på centrifugalregulatoren 5. Til dette formål tænder operatøren servomotoren 15, drejer skiven til den passende vinkel, rotationen udføres af snekkegearet 14, tandhjulene 13, Selsyn-sensoren 12, Selsyn-modtageren 7 og reduktionsgearet 6.Ved at ændre rummet A samtidigt gennem snekkegearet 20 og grebet 16, bevæger pladen 18 sig i det vandrette plan med føringerne 19 af den øvre glider 17 af savrammen, og hældningen af saven 21 ændres.
Et skematisk kredsløbsdiagram af en savværksramme 2P80 er vist i fig. 2. Dets elektriske udstyr består af 125 kW hovedakseldrevet asynkronmotor M1, savramme vippemekanisme drev M2 motor, hydraulisk stationsmotor MZ, smørepumpemotor M4 og automatisk styresystem , baseret på et tyristordrev med en DC-motor M5.
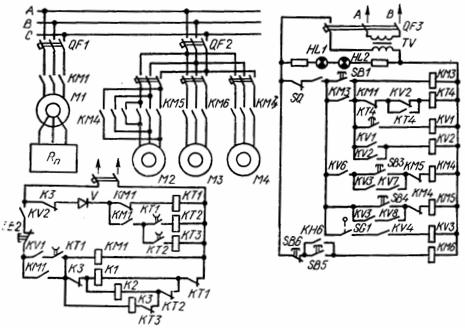
Ris. 2. Elektrisk skematisk diagram af savværksrammen 2P80
Den maksimale strømbeskyttelse af motorer leveres af automatiske kontakter: QF1 — motor M1, QF2 — motorer M2, MZ, M4 og QF3 — styrekredsløb Når QF3 er tændt, lyser advarselslamperne HL1 og HL2. Hovedakselmotoren M1 startes ved hjælp af den lineære kontaktor KM1, og drivmotoren til fødemotoren M5 startes ved hjælp af kontaktoren KM2.
Det elektriske styrekredsløb omfatter: strømkredsløb (drivmotorer); relæ-kontaktor styrekredsløb og kredsløb af automatisk styresystem baseret på tyristor DC-drev. For at aktivere starten af savrammedrevet, når den øverste låge er åben, fjernes hovedakslen og kileremmens sikkerhedslister, og når savrammen er stoppet, bruges endestopkontakter (hvis blok er angivet i fig. 2) med bogstaverne SQ).
Starten af motoren M1 med en viklet rotor udføres som en funktion af tiden ved sekventielt at lukke accelerationsrelæerne KT1, KT2 og KT3, som med en given tidsforsinkelse gradvist udsender tre trin af startreostaten Rp ved hjælp af kontaktorerne K1, K2 og K3.
Ved at trykke på startknappen SB1 (se fig. 2) tændes spolen på kontaktoren KM3, som lukker strømkontakterne KM3 på motoren M4 på oliepumpen, lukkekontakten KM3 omgår knappen SB1.
Hovedbevægelsesmotoren M1 startes, når kontakten KV1 på mellemrelæet KV1 lukkes. Spolen til dette relæ modtager strøm gennem KT4-kontakten på KT4-tidsrelæet, som lukkes med en forsinkelse, når det er lukket. Derfor giver relæet KT4 en forsinkelse mellem starten af motoren M4 og M1.
Når relæ KV1 er tændt, tænder relæ KV2 samtidigt, hvis lukkekontakt KV2 aktiverer spolen på kontaktor KM1. Spolen KM1, efter at have modtaget strøm, tænder for hovedkontakterne KM1 i strømkredsløbet til motoren M1, og motorens rotor vil begynde at rotere, når startreostaten er fuldt indstillet. Efter at accelerationskontaktorerne K1, K2 og K3 arbejder med deceleration, vil motorrotoren rotere med maksimal hastighed.
Når starten af motoren M1 er færdig, vil åbningskontakten K3 samtidig bryde forsyningskredsløbet til kontaktorerne K1 og K2, og kontakten K3 i motorstartkredsløbet på føderen M5 vil lukke og forberede den til start. Motoren stoppes ved at trykke på knappen SB2.
Det hydrauliske system sørger for hævning og sænkning af for- og bagdørene, på de svejsede huse, hvoraf de øverste tilførselsruller er monteret.Portene løftes til den øverste position af hydrauliske cylindre drevet af en hydraulisk station. Drivningen af den hydrauliske station leveres af motoren M3, som startes med et tryk på en knap, mens spolen KM6 på starteren er aktiveret, hvilket lukker hovedkontakterne på KM6.
Savrammens hældning kan styres manuelt (ved at trykke på knapperne SB3 og SB4) eller automatisk. Med automatisk styring af viklingen KM4 af starteren KM4 ("mere") og KM5 af starteren KM5 ("mindre"), modtager de strøm gennem relæet KV3, som tænder, når tilstandskontakten er i "Automatisk" position , det vil sige, når kontakt SQ1 er lukket.
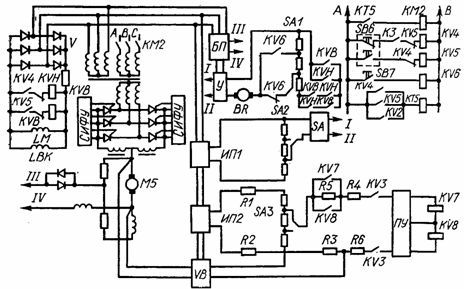
Tyristorstrømforsyningen består af en M5 DC-motor og en tyristorkonverter. Tyristorkonverteren (fig. 9.2, c) tændes af starteren KM2 gennem kontakten KV3, hvis spole modtager strøm, når kontakten til tidsrelæet KT5, som er i sit kredsløb, er lukket. Tidsrelæ KT5 vil blive aktiveret, når spolerne KV4 (fremadgående bevægelse) eller KV5 (tilbagegående bevægelse) aktiveres.
Hvis træstammen sætter sig fast under skæring, trækkes den tilbage ved at vende motoren. Start af fødemotoren er ikke mulig, uden at M1-motoren kører. Dette sikres ved at inkludere kontakt K3 i forsyningskredsløbet KV4, som lukker efter afslutningen af start af motoren M1. Når starteren KM2 er tændt, aktiveres konverteren og motorens feltviklinger LM.
Hvis registret sidder fast, vil et tryk på SB6-knappen slukke for relæerne KV4 og KVB, og relæerne KV5 og KVH tændes.I dette tilfælde lukker KVH-relæet sine kontakter i forsyningskredsløbet til forstærkeren U, som er inkluderet i tyristorkonverteren, som følge heraf ændres polariteten af spændingen ved udgangen af konverteren, og motoren ændrer retningen af rotation.

Stabiliteten af rotationshastigheden, når belastningen ændres, sikres af en negativ feedback, som implementeres af en BR tachogenerator med en LBL excitationsspole. Armaturet BR er forbundet til indgangen på forstærkeren V. Transienten tvinges ved brug af regenerativ bremsning i tyristorkonverterkredsløbet.
Tilspændingen justeres manuelt og automatisk. Til dette er SA-kontakten indstillet. Ved manuel tilspændingsregulering er hastighedsregulatoren forbundet til forstærker U gennem kredsløb I og II. Hastighedscontrollere SA1 — SA3 er kontakter til paneler, som MLT-modstande er forbundet til.
Bevægelse af den bevægelige kontakt SA1 ændrer styresignalet, der kommer ind i pulsfasekontrolsystemet (SPPC) gennem PU-forstærkeren, hvilket ændrer affyringsvinklen for tyristorer forbundet med et broensretterkredsløb, på grund af hvilket hastigheden på motoren M5 ændres.
For automatisk at justere hastigheden på M5-motoren gennem SA-kontakten, kobles SA1 fra forstærkerblokken Y og tilsluttes forstærkeren Y SA2 - journaldiametersensoren. I dette tilfælde begynder SA1 at modtage strøm fra SA2, som er et potentiometer, der er forbundet til den stabiliserende strømforsyning IP1 og roteret af strømomskiftermekanismen.
Når tappens diameter ændres, bevæger glideren på potentiometeret SA2 sig, og værdien af styrespændingen påført SA1 ændres, derfor ændres tilspændingshastigheden med ændringen i tappens diameter. Hastighedsværdien skal svare til savrammehældningen, hastigheden styres ved at skifte SA3.
Savrammens hældningssensor SA3 er forbundet til en stabiliseret strømforsyning IP2 gennem modstande R1 og R2. Resultatet er en spænding proportional med savrammens hældningsvinkel. Denne spænding sammenlignes med motorspændingen M5, proportional med hastigheden, taget fra motorankeret og føres til modstanden R3 gennem ensretterblokken VB, den trækkes fra udgangsspændingen fra savrammens hældningssensor.
Med motoren i bakgear bevarer VB-blokken en konstant referencepolaritet. Mistilpasningssignalet føres til indgangen på mellemforstærkeren PU gennem modstandene R4 - R6 og lukkekontakterne KV3 (lukket under automatisk justering). Signalet forstærkes og føres til PU-udgangen, hvortil relæerne KV7 og KV8 er tilsluttet. De udløses afhængigt af polariteten af fejlindgangssignalet.
Så efterhånden som tilførselshastigheden stiger, stiger spændingen, der fjernes fra motoren, og mistilpasningsværdien er negativ. I dette tilfælde er forholdet mellem tilspændingshastigheden og savrammens hældning brudt. Det forstærkede udgangssignal fra PU-forstærkeren inkluderer relæet KV7, hvis lukkekontakter inkluderer spolen KM4.
KM4-lukkekontakter drejer M2-motoren "fremad" — øger savrammens hældning.Samtidig øges udgangsspændingen ved SA3 ved at flytte potentiometerskyderen. Afvigelsessignalet begynder at falde til nul, hvorefter stigningen i savrammens hældning stopper. Dette opretholder et match mellem tilspændingshastigheden og vinklen på savrammen.
Styringsprocessen fortsætter på lignende måde med et fald i tilspændingshastigheden, men fejlsignalet har i dette tilfælde et positivt fortegn. Dette får relæ KV8 til at tænde, samt KM5 og motor M2 til at vende. Efterhånden som fremføringshastigheden falder, falder savrammens hældning også. Under reguleringen omgår drevkontakterne KV7 og KV8 modstanden R5, hvilket gør det muligt at forcere processen.
I begyndelsen af skæringen er det nødvendigt at have en skærehastighed, der ikke svarer til mere end 30 % af arbejdsfremføringshastigheden. Dette gøres på følgende måde. Ved at trykke på knappen SB7 aktiveres relæet KV6, hvis kontakter kobles til udgangen SA1, således at der via lukkekontakten KV6 tilføres en lille styrespænding til tyristorkonverterens indgang, hvilket skaber en lav skærehastighed .
Efter afslutningen af fremføringen slukkes knappen SB7, og enheden går i arbejdstilstand Afbrydelsen af det automatiske styresystem for savrammens vipning under fremføringen sker ved at tilslutte lukkekontakten KV6 til forsyningskredsløbet af startspolerne KM4 og KM5.