Frekvensregulering af en asynkronmotor
I øjeblikket er frekvensstyring af rotationsvinkelhastigheden af et elektrisk drev med en asynkronmotor meget udbredt, da det giver mulighed for i et bredt område at jævnt ændre rotorens rotationshastighed både over og under den nominelle værdi.
Frekvensomformere er moderne, højteknologiske enheder med et bredt justeringsområde, der har et omfattende sæt funktioner til styring af asynkronmotorer. Den højeste kvalitet og pålidelighed gør det muligt at bruge dem i forskellige industrier til at styre drev af pumper, ventilatorer, transportører mv.

Frekvensomformere til forsyningsspænding er opdelt i enfaset og trefaset, men efter design, i roterende og statiske elektriske maskiner. I elektriske maskinkonvertere opnås den variable frekvens ved at bruge konventionelle eller specielle elektriske maskiner. V statiske frekvensomformere ændringen i frekvensen af forsyningsstrømmen opnås ved brug af elektriske elementer, der ikke har nogen bevægelse.
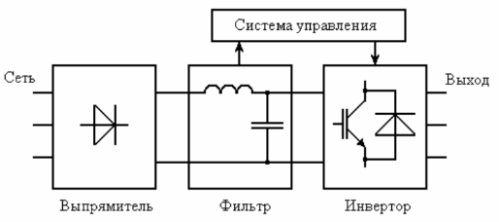
Frekvensomformerkredsløb af en induktionsmotor
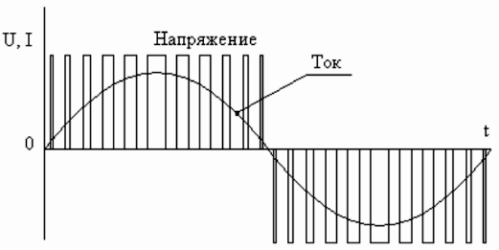
Udgangssignal fra frekvensomformeren
Frekvensomformere til enfaset net kan levere elektrisk drev til produktionsudstyr med en effekt på op til 7,5 kW. Et træk ved designet af moderne enfasede omformere er, at der ved indgangen er en fase med en spænding på 220V, og ved udgangen er der tre faser med samme spændingsværdi, hvilket gør det muligt at tilslutte trefasede elektriske motorer til en enhed uden brug af kondensatorer.
Frekvensomformere drevet af 380V trefaset netværk er tilgængelige i effektområdet fra 0,75 til 630 kW. Afhængigt af strømværdien produceres enheder i polymerkombinerede og metalhuse.
Den mest populære styringsstrategi for induktionsmotorer er vektorstyring. I øjeblikket implementerer de fleste frekvensomformere vektorstyring eller endda sensorløs vektorstyring (denne tendens findes i frekvensomformere, der oprindeligt implementerer skalarstyring og ikke har terminaler til tilslutning af en hastighedssensor).
Afhængigt af typen af udgangsbelastning er frekvensomformere underopdelt i henhold til typen af implementering:
-
til pumpe- og ventilatordrev;
-
til generel industriel elektrisk fremdrift;
-
fungerer som en del af elektriske motorer, der arbejder med overbelastning.

Mekaniske egenskaber ved typiske belastninger
Moderne frekvensomformere har et mangfoldigt sæt funktionelle egenskaber, for eksempel har de manuel og automatisk styring af motorens hastighed og rotationsretning, samt indbygget potentiometer på kontrolpanelet.Begavet med evnen til at justere udgangsfrekvensområdet fra 0 til 800 Hz.
Omformere er i stand til automatisk at styre en asynkronmotor i henhold til signaler fra perifere sensorer og drive et elektrisk drev i henhold til en given timing-algoritme. Understøtte automatiske gendannelsesfunktioner i tilfælde af kortvarigt strømsvigt. Udfør transient kontrol fra en fjernkonsol og beskyt elektriske motorer mod overbelastning.

Forholdet mellem omdrejningsvinkelhastigheden og forsyningsstrømmens frekvens følger af lign
ωo = 2πe1/ p
Med en konstant forsyningsspænding U1 og en ændring i frekvens ændres induktionsmotorens magnetiske flux. På samme tid, for bedre udnyttelse af det magnetiske system, med et fald i strømforsyningsfrekvensen, er det nødvendigt at reducere spændingen proportionalt, ellers vil magnetiseringsstrømmen og tabene i stålet stige betydeligt.
På samme måde, når forsyningsfrekvensen stiger, skal spændingen stige proportionalt for at holde den magnetiske flux konstant, fordi dette ellers (med et konstant akselmoment) vil få rotorstrømmen til at stige, overbelastning af dens viklinger med strøm og reducere det maksimale drejningsmoment.
Den rationelle spændingsreguleringslov afhænger af arten af modstandsmomentet.
Ved et konstant moment af statisk belastning (Ms = const) skal spændingen reguleres i forhold til dens frekvens U1 / f1 = const. For arten af blæserbelastningen har forholdet formen U1 / f21 = konst.
Med belastningsmoment omvendt proportional med hastighed U1 /√f1 = konst.
Nedenstående figurer viser et forenklet tilslutningsdiagram og mekaniske karakteristika for en induktionsmotor med frekvensstyring af vinkelhastighed.
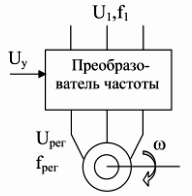
Tilslutningsdiagram af en frekvensomformer til en asynkronmotor
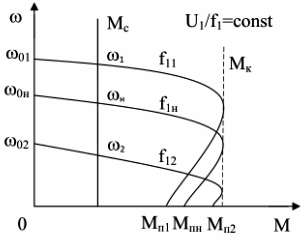
Karakteristika for en belastning med et konstant statisk modstandsmoment
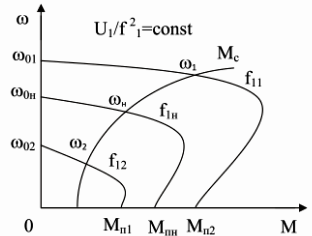
NSF-funktioner til opladning af blæseren
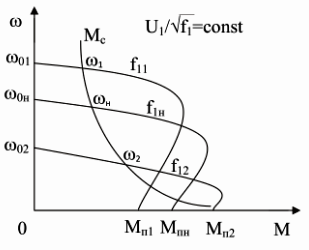
Karakteristika under statisk belastning drejningsmoment omvendt proportional med rotationsvinkelhastigheden
Frekvensregulering af hastigheden på en asynkronmotor giver dig mulighed for at ændre rotationsvinkelhastigheden i området — 20 … 30 til 1. Regulering af hastigheden på en asynkronmotor ned fra hovedmotoren udføres praktisk talt til nul.
Når frekvensen af forsyningsnettet ændres, afhænger den øvre grænse for rotationshastigheden af en asynkronmotor af dens mekaniske egenskaber, især da den ved frekvenser over den nominelle asynkronmotor fungerer med bedre energikarakteristika end ved lavere frekvenser. Derfor, hvis der anvendes en gearkasse i drivsystemet, skal denne frekvensstyring af motoren udføres ikke kun ned, men også op fra det nominelle punkt, op til den maksimalt tilladte omdrejningshastighed under betingelserne for den mekaniske styrke af rotoren.
Når motorhastigheden stiger over den værdi, der er angivet i dens pas, bør frekvensen af strømkilden ikke overstige den nominelle med højst 1,5 - 2 gange.
Frekvensmetoden er mest lovende til regulering af en egern-burrotorinduktionsmotor. Effekttab med en sådan regulering er små, da de ikke er ledsaget af en stigning i glider… De resulterende mekaniske egenskaber er meget stive.