Udvalg af motorer til elevatorer og løftemaskiner med kraft
 Moderne passager- og godselevatorer i bolig- og administrationsbygninger samt nogle maskiner til at løfte miner udføres med en modvægt eller, som det nogle gange kaldes, med en modvægt. I minemaskiner udføres balancering, som allerede nævnt, ofte ikke af en modvægt, men af et andet løftefartøj.
Moderne passager- og godselevatorer i bolig- og administrationsbygninger samt nogle maskiner til at løfte miner udføres med en modvægt eller, som det nogle gange kaldes, med en modvægt. I minemaskiner udføres balancering, som allerede nævnt, ofte ikke af en modvægt, men af et andet løftefartøj.
Modvægten til elevatorer er valgt for at balancere vægten af løftefartøjet (vognen) og en del af den nominelle last, der skal løftes:

hvor GH er vægten af den nominelle løftelast, N; G0 — kabinevægt, N; Gnp er vægten af modvægten, N; α er balanceringsfaktoren, normalt taget lig med 0,4-0,6.
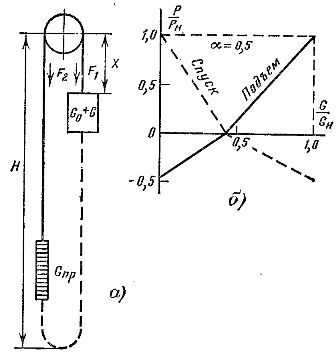
Ris. 1. For at beregne belastningen på elevatormotorens aksel.
Behovet for at balancere tunge skibe er indlysende, da for at flytte dem i mangel af en modvægt kræves en tilsvarende stigning i motorkraften. Evnen til at afbalancere en del af den nominelle nyttelast afsløres, når den ækvivalente effekt for en given belastningskurve bestemmes.Det er f.eks. ikke svært at følge, at hvis elevatoren hovedsageligt arbejder med at hæve lasten og sænke den tomme bil, så har den tilsvarende motoreffekt ifølge lastdiagrammet et minimum ved α = 0,5.
Tilstedeværelsen af en modvægt fører til en udfladning af motorens belastningskurve, hvilket reducerer dens opvarmning under drift. Idet der henvises til diagrammet vist i fig. 1, a, derefter med vægtværdien af modvægten

og fraværet af balancereb og kabinefriktion og modvægten på guiderne, kan du skrive:


hvor gk er vægten af 1 m reb, N/m.
Trækstyrke

Motorakslens drejningsmoment og effekt bestemmes ud fra følgende formler:
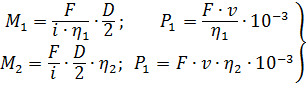
hvor M1, P1 — drejningsmoment og effekt, når drevet kører i motortilstand, henholdsvis Nm og kW; M2, P2 — drejningsmoment og effekt, når drevet kører i generatortilstand, henholdsvis Nm og kW; η1, η2 — snekkegeareffektivitet med direkte og omvendt energioverførsel.
Værdierne af η1 og η2 afhænger ikke-lineært af snekkeakslens hastighed og kan beregnes ved hjælp af formlerne
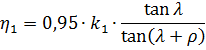

her er λ stigningsvinklen for spirallinjen på ormens indekseringscylinder; k1 er en koefficient, der tager højde for tabene i gearkassens lejer og oliebad; ρ — friktionsvinkel, afhængig af snekkeakslens rotationshastighed.
Af formlen for kraften på trækskiven følger det, at i fravær af et balancereb afhænger belastningen på løftespillets elektriske drev af løftefartøjets position.
På grund af deres store belastningskapacitet — op til 10 tons, høje bevægelseshastigheder — 10 m/s og mere, høje løftehøjder på 200-1000 m og barske arbejdsforhold, er mineløftemaskiner udstyret med ståltove med stor masse. Forestil dig for eksempel, at det ene pas sænkes til den nederste horisont, mens det andet er ovenover, og i det øjeblik bliver det losset. I denne position er hele hovedtovet ubalanceret, og i begyndelsen af opstigningen skal motoren overvinde det statiske moment, der genereres af vægten af lasten og rebet. Balancering af rebet finder sted midt på springenes bane. Så knækker den igen, og vægten af den nedadgående del af rebet vil hjælpe med at aflæsse motoren.
Ujævn belastning, især i dybe miner, medfører behov for at overvurdere motorkraften Derfor anbefales det ved en løftehøjde på mere end 200-300 m at balancere hovedløftetovene ved hjælp af haletove, der er ophængt af løftefartøjerne. Normalt vælges halerebet med samme tværsnit og længde som det vigtigste, hvilket resulterer i, at løftesystemet viser sig at være afbalanceret.
Da belastningen ændres under driften af elevatorer og løftemaskiner, for at bestemme motorakslens kraft eller moment for hver belastning, er det praktisk at bygge en graf over afhængigheden af disse værdier af belastningen på flere punkter, som har omtrent samme karakter som vist i fig. 1b og derefter bruge det til at konstruere lastdiagrammer.
I dette tilfælde skal driftstilstanden for løftemaskinens elektriske drev være kendt, hvilket i høj grad er bestemt af den relative varighed af PV-aktiveringen og antallet af starter pr. time af motoren. For elevatorer, for eksempel, er driftstilstanden for det elektriske drev bestemt af installationsstedet og formålet med elevatoren.
I beboelsesbygninger er trafikplanen relativt ensartet, og den relative varighed — PV og motorstartfrekvens h er lig med henholdsvis 40 % og 90-120 starter i timen. I højhuse kontorbygninger stiger elevatorbelastningen kraftigt i timerne for ankomst og afgang af medarbejdere fra arbejde, og derfor vil høje værdier i frokostpausen have PV og h-40-60% og 150 -200 starter i timen.
Efter at tegningen er færdig statisk belastning på motorakslen, det elektriske drivsystem og hejsemotoren er valgt, kan anden fase af opbygningen af et lastdiagram udføres — under hensyntagen til effekten af transienten på lastdiagrammet.
For at opbygge et komplet belastningsdiagram er det nødvendigt at tage højde for tidspunkterne for acceleration og deceleration af det elektriske drev, tidspunktet for åbning og lukning af dørene, antallet af stop under bilens bevægelse, tiden af ind- og udgående passagerer under den mest typiske arbejdscyklus. For elevatorer med automatisk betjente døre er det samlede tidstab bestemt af dørenes betjening og fyldningen af vognen 6-8 sek.
Tiderne for bilens acceleration og deceleration kan bestemmes ud fra bevægelsesdiagrammet, hvis bilens nominelle hastighed og de tilladte værdier for acceleration (deceleration) og ryk er kendt. I henhold til belastningsdiagrammet, bygget i henhold til de angivne statiske og dynamiske tilstande af det elektriske drivsystem, er det nødvendigt at foretage en beregningsberegning af motoren, når den opvarmes, ved hjælp af en af de velkendte metoder: gennemsnitlige tab eller tilsvarende værdier.
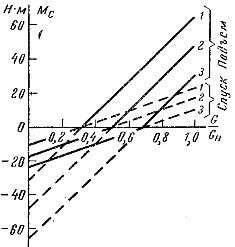
Ris. 2. Afhængigheder af det elektriske drevs drejningsmoment af vognens last, elevatoren, når sidstnævnte er på første sal (1), i midten af akslen (2) og på sidste etage (3).

Et eksempel. Ifølge de tekniske data for en højhastighedspassagerelevator skal du bestemme de statiske momenter på motorakslen i forskellige driftstilstande.
Givet:
• maksimal belastningskapacitet Gn = = 4900 N;
• bevægelseshastighed v = 1 m/s;
• løftehøjde H = = 43 m;
• kabinevægt G0 = 6860 N;
• kontravægt Gnp = 9310 N;
• trækbjælkens diameter Dm = 0,95 m;
• transmissionsforhold for spilgearkassen i = 40;
• transmissionseffektivitet under hensyntagen til kabinefriktionen på akselføringerne η = 0,6;
• vægt af rebet GKAH = 862 N.
tabel 1

Trækstyrke:


Når elevatorsystemet fungerer, når Fc > 0, fungerer den elektriske maskine i motortilstand, og når Fc er 0, og i motortilstand, når Fc < 0.
Resultaterne af beregningen af de statiske momenter i henhold til formlen er opsummeret i en tabel. 1 og er vist i grafen i fig. 2.Bemærk, at mere nøjagtige beregninger bør tage højde for modstanden mod bevægelsen af akselstyrene, som er 5-15% af Fc.