Layout af en transportørlinje med tre transportører
 Når du administrerer en gruppe af transportører, der betjener et komplekst teknologisk kompleks, er det nødvendigt at indføre forskellige låse. Derudover er signalering af mekanismernes tilstand meget vigtig i udformningen af kontrolkredsløbet, som oftest implementeres ved hjælp af et letvægts mnemonisk kredsløb placeret på operatørens kontrolpanel.
Når du administrerer en gruppe af transportører, der betjener et komplekst teknologisk kompleks, er det nødvendigt at indføre forskellige låse. Derudover er signalering af mekanismernes tilstand meget vigtig i udformningen af kontrolkredsløbet, som oftest implementeres ved hjælp af et letvægts mnemonisk kredsløb placeret på operatørens kontrolpanel.
I fig. 1 viser en transportørlinie bestående af tre på hinanden følgende transportører. Båndtransportørernes elektriske drev er tilvejebragt af egern-burrotorasynkronmotorer, hvis styrekredsløb er vist i samme figur.
Styrekredsløbet for de elektriske motorer i transportørgruppen giver: den nødvendige varighed af start af transportbåndet i retning modsat belastningsstrømmen. Dette eliminerer faren for tilstopning af overbelastningspunktet. Derfor er starten af hver efterfølgende transportør (i retning mod strømmen af varer) kun tilladt, når det lastbærende legeme af den forrige transportør er fuldt accelereret.
Denne blokering udføres ved hjælp af et hastighedsrelæ, der styrer trækelementets bevægelse; den nødvendige sekvens for at stoppe transportbåndet i retning af belastningsstrømmen.
En sådan aflåsning skal være tilvejebragt for at sikre, i tilfælde af et nødstop af en af transportørerne, standsning af alle transportører fra ladestedet til den standsede transportør, og de resterende transportører skal fortsætte med at fungere for at frigøre bugseringen krop fra belastningen; kontrol af starttidspunktet for båndtransportørerne.
Længerevarende start indikerer enten en funktionsfejl i den elektriske motor eller dens styresystem eller glidning af remmen på drivtromlen, hvilket er uacceptabelt.
Styrekredsløbet skal give mulighed for at standse transportbåndet fra ethvert punkt, nødstop af transportøren og alle efterfølgende i startretningen i tilfælde af: forlænget starttid for transportøren, reduktion af transportbåndets hastighed, brud på trækelementet, uacceptabel overskridelse af trækelementets bevægelseshastighed, overbelastning af transportørens elektriske motor, overophedning af lejerne på drivtromlerne, dannelse af blokeringer på steder med overbelastning, sænkning af transportbåndet, styrekredsløbenes egensikkerhed og minimumsantallet af kerner.
Følgende typer signalering skal være tilvejebragt i flow-transportsystemets kontrolskema: advarsel, nødsituation, for antallet af tilsluttede transportører osv.
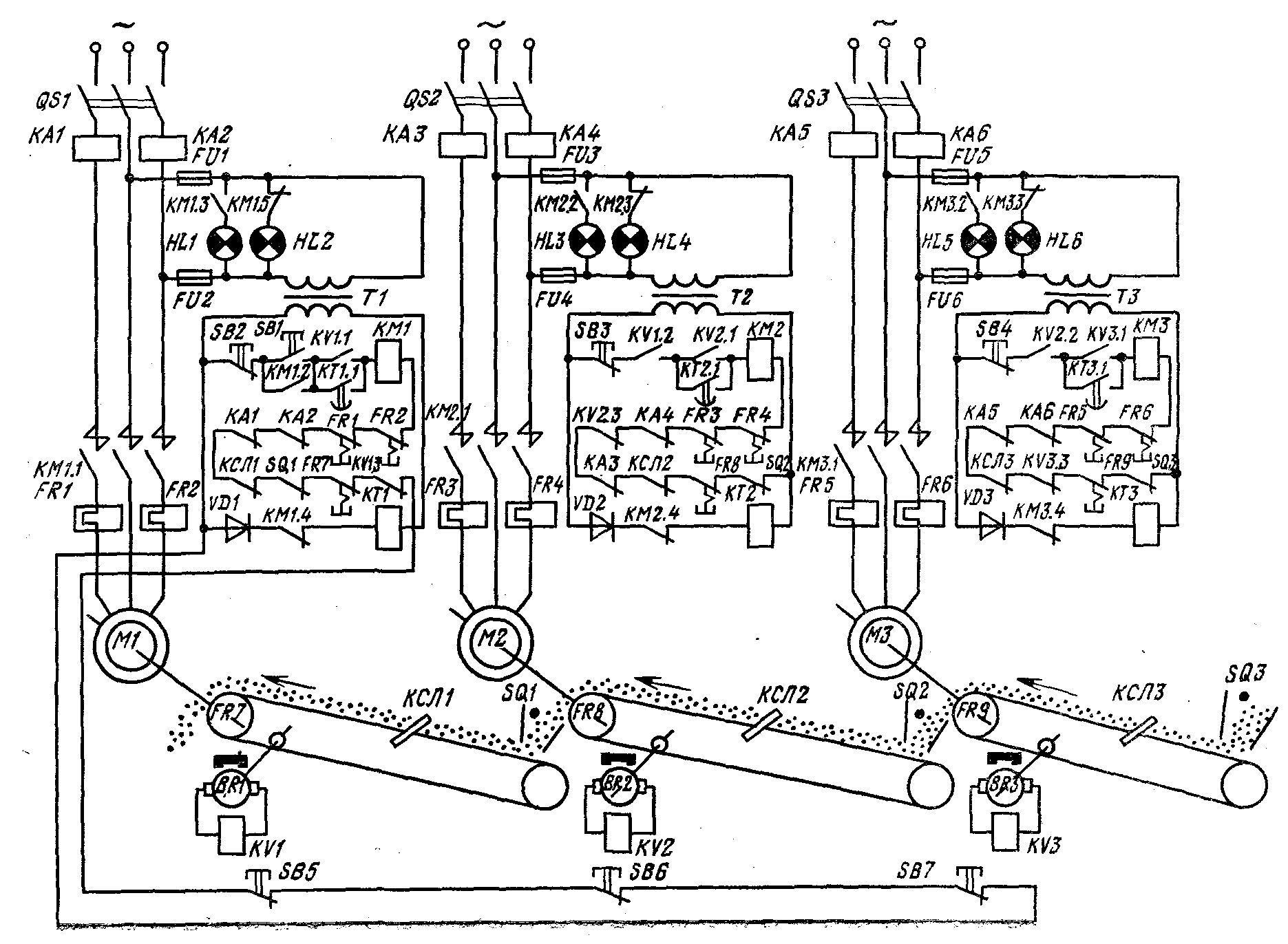
Ris. 1. Styrekredsløb for det elektriske drev af tre transportører (flow-transportsystem)
I henhold til ovenstående krav udføres starten af transportbåndet i følgende rækkefølge.Først startes M1-motoren ved at trykke på SB1-knappen. Samtidig modtager kontaktor KM1 strøm og, når den aktiveres, lukker dens linjekontakter KM1.1 i statorkredsløbet af asynkronmotor M1. Motoren begynder at rotere og driver transportbåndet.
Samtidig er hjælpekontakterne lukket: KM1.2, som omgår SB1-knappen, og KM1.3, som tænder signallampen HL1, hvilket indikerer driftstilstanden for motoren M1. Åbningskontakt KM1.4 slukker for tidsrelæ KT1, som tæller den tid, der kræves for at accelerere motoren til dens maksimale hastighed.
 Når transportbåndet er i bevægelse, roterer akslen på tachogeneratoren til hastighedsrelæet KV1. Når transportbåndet når sin maksimale hastighed, giver relæet KV1 et signal om at lukke sine kontakter: KV1.1 i kredsløbet, uden om kontakten KT1.1, og den anden — KV1.2 i styrekredsløbet for den næste transportør.
Når transportbåndet er i bevægelse, roterer akslen på tachogeneratoren til hastighedsrelæet KV1. Når transportbåndet når sin maksimale hastighed, giver relæet KV1 et signal om at lukke sine kontakter: KV1.1 i kredsløbet, uden om kontakten KT1.1, og den anden — KV1.2 i styrekredsløbet for den næste transportør.
Startprocessens normale forløb styres af tidsrelæet KT1. Efter at den indstillede tid er udløbet, frigiver relæ KT1 sit anker og får dets kontakt KT1.1 til at åbne i kontaktorkredsløbet KM1. På trods af åbning af kontakt KT1.1, modtager kontaktor KM1 fortsat strøm gennem den lukkede kontakt KV1.2.
Hvis remmen af en eller anden grund ikke har nået sin maksimale hastighed i den tid, der kræves for at starte, vil kontakten KT1.1 åbne, før kontakten KV1.1 lukker, og motoren M1 stopper, fordi kontaktorens kredsløb KM1 vil være åben. .
Stramningen skyldes, at remmen glider over tromlen. Dette er en farlig tilstand, der kan få båndet til at gå i brand. Derfor giver kredsløbet en interlock, der slår denne farlige tilstand fra.I tilfælde af normal start af den første motor M1, gives et signal om at tænde motoren M2 på den anden transportør - kontakt KV1.2 lukker. Spolen på kontaktoren KM2 flyder rundt med strøm, og når den aktiveres, lukker dens kontakter KM2.1 i statorkredsløbet på den anden motor M2. Kontrol over starten af den anden motor udføres i samme rækkefølge.

Følgende typer beskyttelse er tilvejebragt i styringsordningerne for elektriske motorer:
-
fra motoroverbelastning — termiske relæer FR1 — FR6;
-
fra overophedning af drivtromlens lejer - termiske relæer FR7 - FR9;
-
fra overhastighed af transportbåndet — hastighedsrelæ KV1.3 — KV3.3;
-
fra det faldende bånd — relæ KSL1 — KSL3;
-
fra blokering ved opladningspunkterne — gennem kontakter SQ1 — SQ3.
Når en af beskyttelsestyperne udløses, stopper ikke kun den transportør, der er ude for en ulykke, men også de følgende mod strømmen af lasten. De resterende transportører i laststrømmens retning forbliver i drift.
I styrekredsløbet anvendes lyssignalering, som viser status for de elektriske motorer: grønne lamper HL2, HL4, HL6 er tændt, hvilket indikerer motorens deaktiverede tilstand, rød HL1, HL3, HL5 - for arbejdstilstand. Du kan stoppe transportbåndet fra ethvert punkt på banen ved at trykke på en af knapperne SB5, SB6, SB7.