Elektriske styrekredsløb
 Afhængigt af passagerelevatorernes hastighed anvendes følgende typer strømstyringskredsløb:
Afhængigt af passagerelevatorernes hastighed anvendes følgende typer strømstyringskredsløb:
-
lavhastighedselevatorer har egernbur eller faserotormotorer og en knap- eller håndtagskontrol,
-
højhastighedselevatorer - to- eller en-hastighedsmotorer styret af magnetiske stationer eller tyristorkontrolstationer (TSU-R) med kontrolknapper,
-
højhastigheds- og højhastighedselevatorer - DC-motorer styret af "generator - motor" -systemet med forskellige magnetiseringsskemaer eller af "thyristorkonverter - motor" -systemet med knapper,
-
Der kan også anvendes kæder af asynkrone ventilkaskader (AVK), hvis anvendelse gør det muligt at øge effektiviteten. installation.
Passagerelevatorer, afhængig af passagerflow, løftehøjde og antallet af elevatorer, der betjener passagerer, er opdelt i enkelt- og gruppestyring.
Singler inkluderer:
a) elevatorer, der opererer på enkeltordrer og anløb uden krydsningsstop under passagerernes ned- og opstigning,
b) elevatorer med påstigning af passagerer ved nedgang, men med opkaldsforbud ved opstigning,
c) det samme, men med registrering af opkald ved faldende med deres efterfølgende udførelse.
Gruppebetjente elevatorer inkluderer:
a) elevatorer med én knap til at ringe til landingspladserne, uanset antallet af installerede elevatorer (dobbeltstyring bruges oftere) og med passagerer boarding ved nedstigning,
b) det samme, men med den komplette samling af passagerer på de mellemliggende etager til på- og afstigning (normalt installeret i administrative, uddannelsesmæssige og andre bygninger).
Derudover er det meget almindeligt at sende elevatorer til en række huse og hele kvarterer, når kredsløbenes tilstand overvåges fra én ekspeditionskonsol og flere elevatorer styres.
Uanset elevatorernes hastighed, enkelt- eller gruppestyring af dem, er de nødvendige elementer i de fleste af deres ordninger som følger:
-
selvjusterende knapper, klæbende eller lukkeknapper til at ringe til førerhuse og give en ordre fra førerhuset,
-
forskellige valgsensorer og præcise stoptilpasningsanordninger til at registrere kabinens placering og de elektriske kredsløbs tilstand,
-
sensorer og låse for hejsetovenes tilstand, minens og kabinedørenes tilstand (åbne eller lukkede),
-
grænseafbrydere til at begrænse hastigheden og graden af kabinebelastning,
-
indikatorer for bilens bevægelsesretning og, i nogle elevatorer, tilstedeværelsen af en last i bilen.
Af disse punkter vil vi dvæle mere detaljeret ved positionsmatchende enheder (PSC'er), som bestemmer det sted, hvor minevognen skal stoppe, når et opkald eller en ordre opstår, og dens bevægelse op eller ned.De resterende varer er normalt forskellige modifikationer af endestop, kendt fra andre kurser.
Strukturelt er positionstilpasningsanordninger implementeret i form af et sæt tre-positions elektromekaniske eller induktive eller magnetiske (reed) sensorer placeret i miner, med signaler udsendt til et relæ eller en berøringsfri vælger i maskinrummet (CCP'er er nogle gange implementeret i form af centrale gulvenheder placeret i maskinrummet) …
Sensorerne placeret i minen interagerer med de førerhusmonterede grene (til elektromekaniske) eller magnetiske shunts (til induktive eller reed-kontakter) og sender signaler til den centrale gulvenhed (trinkopimaskine eller relærelæ), der er installeret i maskinrummet, og sidstnævnte sender og et kontrolkredsløb - et signal til at udføre den modtagne kommando.
Det er mere hensigtsmæssigt at placere sensorerne til bilens bevægelsessignaler op eller ned i bilen (færre ledninger er nødvendige) og installere magnetiske shunts i minerne på de nødvendige punkter. I dette tilfælde, med digital kontrol, er antallet af søjler med installerede shunts langs akslen lig med antallet af bits af det transmitterede etagenummer i binær eller anden kode.
Elektromekaniske kontakter med tre positioner flyttes til en af de positioner, der svarer til bevægelsen af førerhuset op eller ned, eller dets stop, ved hjælp af et krøllearrangement.I dette tilfælde, når bilen bevæger sig, tændes kontakterne på kontakterne på de passerede etager til en af slutpositionerne, hvilket forbereder handlingen af kæden af opkald og ordrer, og når bilen stopper, er kontakten flyttes til midterpositionen, og slukker styrekredsløbet fra retningskontaktorerne og udelukker dermed bilen fra at forlade gulvet, når der ved en fejl trykkes på ordre- eller opkaldsknappen.
For at sikre en forholdsvis nøjagtig bremsning af elevatorstolen, begyndte man for nylig at bruge kontaktløse induktive eller kontaktforseglede magnetisk styrede (reed) sensorer i deres styrekredsløb. Disse sensorer er installeret både i minen og i kabinen: I minen er der sensorer til valg (deceleration), og i kabinen er der en sensor til præcis stop. For at interface med sensorerne er en lanterne magnetisk selektiv shunt placeret på cockpittet, og ferromagnetiske præcisions-stop shunts er placeret i akslen (på hver etage).
Induktive sensorer består af et åbent U-formet magnetisk kredsløb med en spole indesluttet i et hus. Viklingen af det udøvende relæ er forbundet i serie med det, og en vekselstrømspænding (U) påføres dem.
Med et åbent magnetisk kredsløb er den magnetiske flux, der krydser spolen, lille. Derfor er e.m.f. og selvinduktionsstrømmen i spolens ledninger, såvel som den induktive modstand (X) forårsaget af den, er praktisk talt fraværende, så spolens modstand er aktiv (R). Strømmen i serieforbundne spoler er relativt stor; imiterer lukningen af kontakterne i kontaktsystemet (relæet tænder).
Når shunten lukker det U-formede magnetiske kredsløb, øges den magnetiske flux, der krydser dens spole, og derfor øges emk. selvinduktans samt spolens induktive modstand på grund af det. Som et resultat falder strømmen i spolerne forbundet i serie, hvilket simulerer åbningen af kredsløbet i kontaktsystemet (executive relæet er slukket).
Reed-kontakten er en U-formet krop, hvori på den ene side af rillen er placeret to forseglede glasflasker med vakuum indeni og kontakter fastgjort på fjederplader, som er forbundet med de respektive elevatorstyrekredsløb. På den anden side af åbningen er der en permanent magnet. Arbejdselementet i sådanne sensorer er en ferromagnetisk shunt, der passerer gennem det U-formede snit, når elevatorstolen bevæger sig.
Funktionsprincippet for disse sensorer er som følger: fjederkræfterne på kontaktpladerne på reed-kontakterne er rettet således, at hvis feltet af en permanent magnet ikke virker på dem, så er de normalt åbne kontakter åbne, og de normalt lukkede kontakter er lukkede, dvs. kredsløbene, som disse kontakter er forbundet til, åbnes eller lukkes.
Denne reed switch tilstand vil være, når den ferromagnetiske shunt er i rillen af et U-formet legeme, fordi magnetfeltlinjerne i den permanente magnet er lukket hen over shunten. Når shunten forlader rillen, lukkes de magnetiske feltlinjer på tværs pladerne, der overvinder deres fjedervirkning, og reed-kontaktkontakterne, og derfor kredsløbene, som de er forbundet til, går i den modsatte tilstand.

Som et eksempel, der afspejler hovedtrækkene ved elevatorkontrolskemaer, kan du overveje kontrolskemaet for en enkelt elevator uden tilhørende stop vist i fig. 1. Elevatoren betjener fire etager; en to-trins asynkronmotor M bruges som en executive motor.
Medtagelsen af lave (Ml) eller høje (B) motoromdrejninger udføres af de tilsvarende kontaktorer Ml og B. Motorens rotationsretning bestemmes af kontaktorerne B og H, deceleration - af en ekstra modstand P, stop - med elektromagnetisk bremse ET.
Anvendes som gulvafbrydere berøringsfrie induktive sensorer (DTS, DTOV og DTON) forbundet i serie med relæspolerne (RIS, RITOV, RITON). TTP-sensorerne bruges til at tænde for elevatordrevet til høj hastighed og give en impuls til at sænke farten, mens DTOV- og DTON-sensorerne er designet til præcist at stoppe elevatoren i gulvniveau af den tilsvarende etage og placeres på vognen, magnetiske shunts til dem er installeret i akslens aksel.
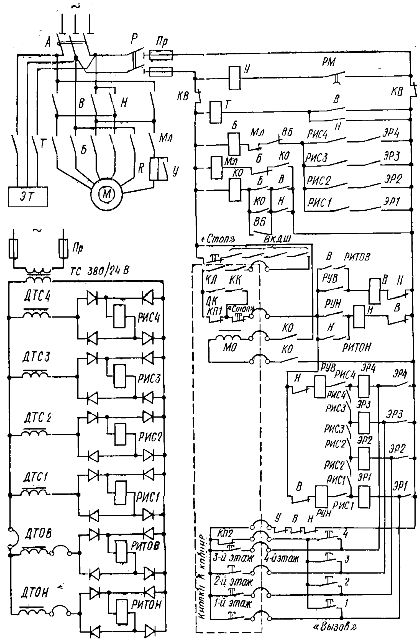
Ris. 1. Skematisk diagram af en enkelt elevatorstyring
Lad os overveje formålet med de resterende elementer i kredsløbet og dets drift ved at bruge eksemplet med at flytte en kabine med en passager fra 1. til 3. sal, idet det antages, at den automatiske maskine A, afbryderen P og grænseafbryderne KB begrænser bevægelse af kabinen op og ned i nødtilstande, er lukket og kabinen er i stueetagen. I dette tilfælde strømmer RIS-relæets spoler, ud over relæet på første sal, fra mærkestrømmen.
Når der trykkes på knappen «3. sal», dannes følgende elektriske kredsløb: netværksfase — afbryderens pol P — sikring Pr — endestop KB — knap «Stop» — låsning af minedørene D1 — D4 — kontakter til opspænding rebet KK — sikkerhedsendestopkontakt KL — kabinedørkontakter DK — kontakter på «Stop»-knappen — åbningsblok -kontakt Н — relæspole RUV — lukkekontakter på relæerne RIS4 og RISZ (spolerne på disse relæer fører strøm) — spole af gulvrelæ ERZ — knap «3. sal» — åbningsblokke — kontakter på kontaktorer U, B, N — grænseafbryder KB — sikring R — adskillerpol P — netværksfase.
Efter at relæet RUV og ER3 er aktiveret, tændes fremadgående kontaktor B, hurtigløbskontaktor B (på spolekredsløb B — blokkontakt ML — højhastighedsafbryder VB — relækontakter RISZ og ER3). Når kontakt B og B er lukket, er motoren forbundet til lysnettet, kontaktor T, udløserremskive og shuntkontaktor KO, som tænder shuntmagneten MO og forbereder kredsløbet af lavhastighedskontaktorspolen Ml, er Tændt. Slaget trækkes tilbage, låsegrebet slippes, og kabinen begynder at bevæge sig.
Når kabinen nærmer sig tredje sal, lukker den ferromagnetiske shunt TTSZ-sensorens spole, dens modstand øges, og RISZ-relæet forsvinder og slukker for ER3- og RUV-relæerne. Som et resultat forsvinder kontaktor B, lukker dens kontakt, tænder lavhastighedskontaktoren Ml, og kontaktor B forbliver tændt, fordi når bilen bevæger sig, er det magnetiske kredsløb af den præcise bremsesensor endnu ikke lukket, derfor RITOV-kontakten er stadig ikke åben endnu.Motoren stoppes ved lav hastighed, der arbejder i generatortilstand med en modstand R. indført i en fase af statoren.
Så snart bilens gulv er på linje med gulvet i gulvet, lukker den magnetiske shunt det magnetiske kredsløb af spolen af den nøjagtige stopsensor DTOV, relæet RITOV forsvinder, og kontaktorerne B, derefter KO og til sidst ML drejes Som et resultat afbrydes motorens elektromagnet og bremsen fra lysnettet, den mekaniske bremse aktiveres, og førerhuset stoppes.
At lære en kollektiv ordning til styring af elevatorer med forbipasserende stop kun ved sænkning af vognen eller en helt kollektiv ordning, dvs. når man passerer stop, mens bilen bevæger sig op og ned, er det nødvendigt i et skema svarende til det diskuteret i fig. 1, indføre nogle tilføjelser. For eksempel, i et motorkredsløb med to hastigheder er de ID-induktive sensorer, RIS-relæet og opkalds- og ordreknapperne på hver etage inkluderet som vist i fig. 2.
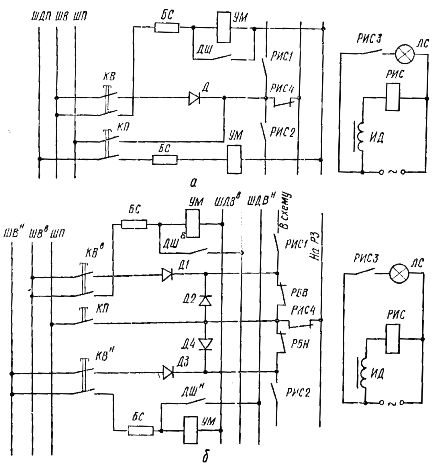
Ris. 2. Fragmenter af tilføjelser til kollektive elevatorkontrolordninger (én etage)
I en ordning med forbikørselsstop ved sænkning af kabinen (fig. 2, a), gives opkald og ordrer med separate klæbende knapper og kan derfor til enhver tid registreres og overføres til ordningen med det samme, undtagen i bevægelsesperioden for kabine med passagerer oppe, når forsyningsbussen til overførselskontaktopkaldene til executive-kredsløbet afbrydes af selektive kontakter fra den positive bus.
I det komplette selektive kontrolskema (fig. 2, b) er der desuden ringekredsløb til boarding (ШДВв) og sænkning (ШДВн) kabiner, kontakterne på blokeringsrelæerne RBV og RBN er forbundet til kontakterne på det selektive sektionskredsløbs udøvende kredsløb .
I diagrammerne vist i fig. 1 og 2, i mangel af en kabine på gulvet, aktiveres spolerne af den induktive ID-sensor og RIS-relæet. Derfor, når du trykker på kommandokommandoknappen eller ringer til KV (de holdes i tændt tilstand af UM-holdemagneterne, indtil de overvindes af kontakterne på minedørene på denne etage af DSh), dannes et kredsløb (ikke vist i figurer), som inkluderer op-kontrolrelæet RUV, hvis destinationsgulvet er højere end gulvet på parkeringspladsen, eller nedkontrolrelæet LVL, hvis destinationsgulvet er under parkeringspladsen.
Efter bilens ankomst til opkaldsgulvet udluftes ID'et for den induktive sensor, RIS-relæet slukkes, dets kontakter åbner, hvilket slukker for RUV- eller RUN-relæet og LS-lampen (bilen stopper), og ved at lukke RIS4-kontakten forberedes et kredsløb til udførelse af ordren, der kommer fra bilen.
I det komplette kollektive kredsløb brydes kredsløbet divideret med kontakterne RIS1 og RIS2 på gulvet på bilens parkeringsplads ikke kun af disse kontakter, men også af kontakterne på blokeringsrelæet op RBV eller ned RBN (deres spoler) er ikke vist i diagrammet), og hæve-, sænke- og bestillingskredsløbene er adskilt fra hinanden ved at adskille dioder D1 - D4.
Før du trykker på opkalds- eller bestil-knappen, hvis køretøjets kørselsretning endnu ikke er valgt, er alle kontakter i retningsvalgkredsløbet lukket, undtagen RIS4-kontakterne på parkeringsgulvet.Når der trykkes på en af disse knapper, bliver opkaldssignalerne fra etagerne placeret over gulvet på parkeringspladsen derfor forbundet med relæspolen RUN, og kaldesignalerne fra etagerne under parkeringspladsen inkluderer relæet RUV. Efter at retningen er valgt, samtidig med RUV- eller LVL-relæet, tændes et af blokeringsrelæerne RBV eller RBN i modsat retning, hvilket afbryder udgangen gennem sektionskredsløbet af ikke-transiente opkaldssignaler med dets kontakter.
I skemaet vist i fig. 2, a, for at sænke passagererne går kabinen uden stop til samtalens højeste etage og falder derefter med forbipasserende stop, og i diagrammet vist i fig. 2, b, hvis det er nødvendigt at afhente passagerer, går kabinen til den nederste etage i anløbet, stiger derefter med forbipasserende stop.
I de betragtede skemaer er vælgerne lavet på relæelementer. Sammen med dette bruges andre vælgere: cam, fotoelektrisk, kontinuerlig børstesporing, stepping, på statiske elementer osv.
Ved store passagerstrømme er der installeret flere elevatorer i én korridor, som har kombineret kontrol i par eller grupper for at øge komforten og forbedre kraften. Antallet af elevatorer forbundet i grupper overstiger normalt ikke fire, men oftere tre, selvom der kendes systemer, der indeholder op til otte elevatorer i en gruppe.
I gruppekontrol er der normalt tre hovedtilstande for elevatordrift: spidsstigning, spidsnedstigning og afbalanceret bevægelse i begge retninger. Aktivering af elevatorerne til den ene eller anden tilstand udføres af afsenderen eller automatisk ved hjælp af programmeringsuret installeret for hver gruppe elevatorer.
I højhuse er hver gruppe elevatorer fastgjort til at betjene et bestemt område af etager, andre etager betjenes ikke af det. Hvis der er flere elevatorer i gruppen, der betjener et område eller en lav bygning, kan der for at øge den gennemsnitlige bevægelseshastighed ved at reducere antallet af stop tildeles separate elevatorer til at betjene de lige og ulige etager.
For at udføre dobbelt- eller gruppestyring af elevatorer skal deres styrekredsløb være kollektive, og opkald til hver etage i begge retninger skal registreres separat i hver retning af passende lagerenheder indeholdende relæer, transistorer osv.
Som et eksempel, der afspejler funktionsspecifikationerne i parret styring af elevatorer med yderligere parkeringsrelæer af den første elevator 1PC og den anden elevator 2PC, betragtes et fragment af det skematiske diagram vist i fig. 3.
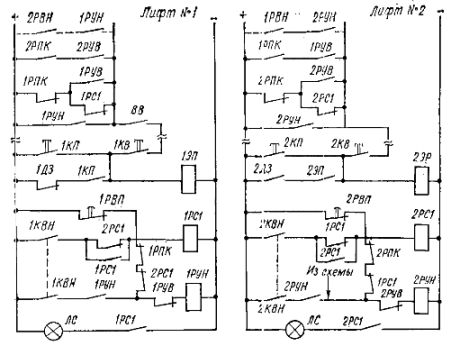
Ris. 3. Fragment af et skematisk diagram af parret elevatorstyring: ER — gulvrelæ, RPK — kanalskifterelæ, RVP automatisk startrelæ
I dette tilfælde besvarer bilen, der kom ned med passagerer på første sal, ikke opkald fra andre etager og venter på passagerer. Hvis der ikke er nogen bil på første sal, så sendes den bil, der rejste sig efter ordre og frigives, automatisk til første sal, og når en anden bil sænkes eller parkeres, forbliver den sidste på gulvet ved slutningen af flyvningen eller går til læssecentralen og bruges til opkaldsdrift hovedsageligt i synkeretningen.
Første sals kabineparkeringsrelæ 1PC1 eller 2PC1 tændes efter ankomsten af kabinen på første sal fra endestopkontakten 1KVN eller 2KVN (installeret i kopimaskinens miner). Disse relæer er blokeret.Derfor indikerer medtagelsen af en af dem, at denne bil ankom til første sal tidligere end den anden. I dette tilfælde tænder relæ 1PC1 eller 2PC1 med dens lukkekontakt LS-signallampen og med dens åbningskontakt afbryder ringekredsløbet i dens elevator og afbryder opkaldet, mens bilen er parkeret på første sal.
Når bilen forlader første sal, slukker dens LS-signallampe, strømmen til de kaldte kredsløb i denne elevator genoprettes umiddelbart efter, at bilen er frigivet, og efter at bilen i en anden elevator ankommer til første sal, er dens computerrelæ. tændt. Denne kabine forbliver i stueetagen og venter på passagerer (hvilket signaleres ved at tænde LS-advarselslampen). Når den bil, der er kommet til ordre frigives, og der ikke er nogen opkald, sendes et signal til kredsløbet, der tænder relæspolerne 1RUN eller 2RUV 1RUN eller 2RUV gennem åbningskontakterne på endestopkontakten 1KVN eller 2KVN, og bilen går til første sal, og t .n.
Motorstyringsudstyret i typiske enkelt-, dobbelt- og gruppeelevatorer er normalt placeret på typiske paneler, stationer eller kontrolenheder installeret i maskinrum.