Vekselstrøms elektriske maskiner
Elektriske maskiner bruges til at omdanne mekanisk energi til elektrisk energi (AC- og DC-generatorer) og omvendt (elektriske motorer).
I alle disse tilfælde anvendes i det væsentlige tre hovedopdagelser inden for elektromagnetisme: fænomenet mekanisk vekselvirkning af strømme opdaget af Ampere i 1821, fænomenet elektromagnetisk induktion opdaget af Faraday i 1831, og den teoretiske sammenfatning af disse fænomener lavet af Lenz (1834) i sin velkendte lov om retningen af den inducerede strøm (faktisk forudsagde Lenz' lov loven om bevarelse af energi til elektromagnetiske processer).

For at konvertere mekanisk energi til elektrisk energi eller omvendt, er det nødvendigt at skabe en relativ bevægelse af et ledende kredsløb med en strøm og et magnetfelt (magnet eller strøm).
I elektriske maskiner, der er designet til kontinuerlig drift, bruges den roterende bevægelse af maskinens bevægelige del (rotoren på vekselstrømsmaskinen), der er placeret inde i den stationære del (statoren).Maskinens spole, der tjener til at skabe magnetfeltet, kaldes induktoren, og spolen, der flyder rundt med driftsstrømmen, kaldes ankeret. Begge disse sidstnævnte udtryk bruges også til DC-maskiner.
For at øge den magnetiske induktion placeres maskinviklinger på ferromagnetiske legemer (stål, støbejern).
Alle elektriske maskiner har egenskaben reversibilitet, det vil sige, at de kan bruges både som generatorer af elektrisk energi og som elektriske motorer.

Asynkrone motorer
Der anvendes asynkrone motorer en af manifestationerne af elektromagnetisk induktion… I fysikkurser demonstreres det som følger:
Under en kobberskive, som kan rotere om en lodret akse, der passerer gennem dens centrum, er der anbragt en lodret hesteskomagnet, der er drevet til at rotere om den samme akse (den mekaniske interaktion mellem skiven og magneten er udelukket). I dette tilfælde begynder skiven at rotere i samme retning som magneten, men med en lavere hastighed. Hvis du øger den mekaniske belastning på skiven (for eksempel ved at øge friktionen af akslen mod tryklejet), falder dens rotationshastighed.
Den fysiske betydning af dette fænomen kan let forklares af teorien om elektromagnetisk induktion: når magneten roterer, skabes et roterende magnetfelt, som inducerer hvirvelstrømme i skiven, hvor størrelsen af sidstnævnte afhænger alt andet lige af relative hastighed af feltet og disken.
Ifølge Lenz' lov skal skiven rotere i feltets retning. I mangel af friktion skal skiven opnå en vinkelhastighed svarende til magnetens hastighed, hvorefter den inducerede emk vil forsvinde. I det virkelige liv er friktion uundgåeligt til stede, og disken bliver langsommere.Dens størrelse afhænger af det mekaniske bremsemoment, som skiven oplever.
Uoverensstemmelsen mellem skivens (rotoren) rotationshastighed og magnetfeltets rotationshastighed afspejles i motorernes navn.
Princippet om drift af asynkronmotorer:
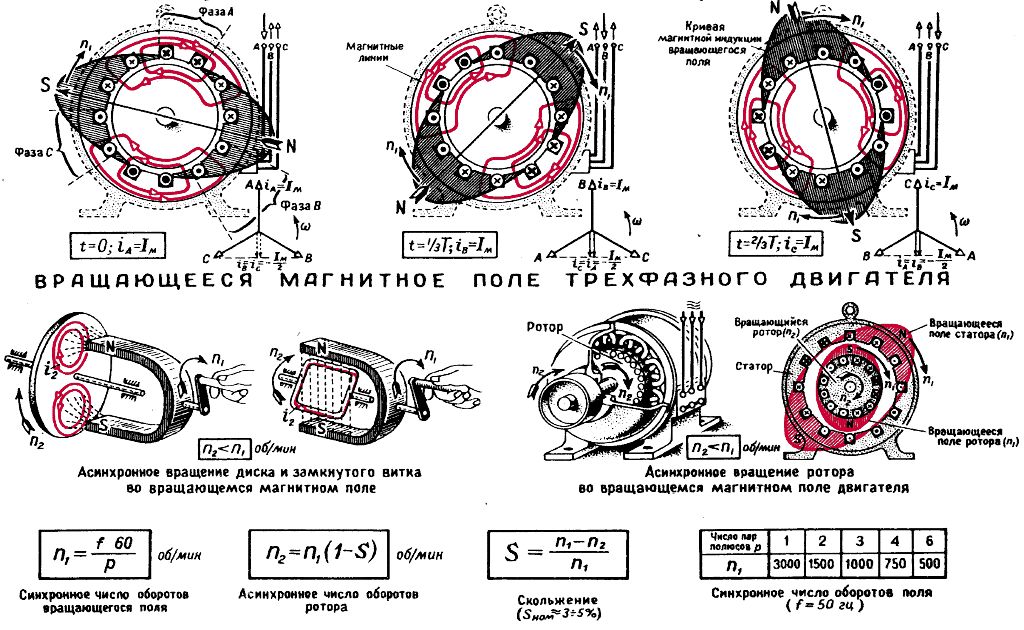
I tekniske asynkronmotorer (oftest trefasede) skabes et roterende magnetfelt flerfasestrømflyder rundt om den stationære statorvikling. Ved frekvensen af trefaset strøm er og antallet af statorspoler 3p roterende felt gør n = f / p omdrejninger / sek.

En roterbar rotor er placeret i statorhulrummet. En roterende mekanisme kan forbindes med dens aksel.I de simpleste "egerncelle"-motorer består rotoren af et system af langsgående metalstænger placeret i rillerne på et cylindrisk stållegeme. Ledningerne er kortsluttet af to ringe. For at øge drejningsmomentet gøres rotorens radius stor nok.
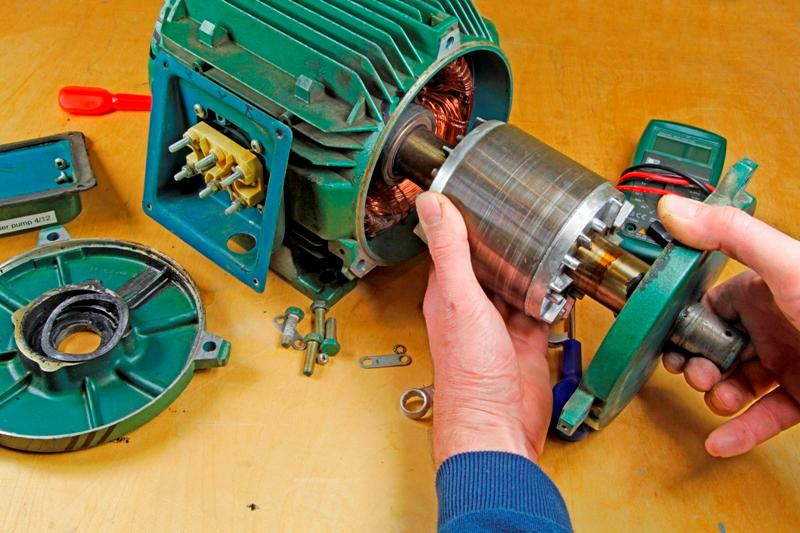
I andre motorkonstruktioner (typisk højeffektmotorer) danner rotorledningerne en åben trefaset vikling. Enderne af spolerne er kortsluttet i selve rotoren, og ledningerne føres ud til tre slæberinge monteret på rotorakslen og isoleret fra denne.
En trefaset rheostat er forbundet til disse ringe ved hjælp af glidende kontakter (børster), som tjener til at starte motoren i bevægelse. Efter at motoren er drejet, fjernes reostaten helt, og rotoren bliver til et egernbur (se — Asynkronmotorer med viklet rotor).

Der er klemtavle på statorhuset. Statorviklingerne føres ud til dem. De kan indgå stjerne eller trekant, afhængigt af netspændingen: i det første tilfælde kan netspændingen være 1,73 gange højere end det andet.
Værdien, der karakteriserer rotorens relative deceleration sammenlignet med induktionsmotorens statorfelt, kaldes glider… Den skifter fra 100 % (i det øjeblik, motoren startes) til nul (ideelt tilfælde af tabsfri rotorbevægelse).
Reversering af induktionsmotorens rotationsretning opnås ved gensidig omskiftning af hver to lineære ledere i det elektriske netværk, der forsyner motoren.

Egernburmotorer er meget udbredt i industrien. Fordelene ved asynkronmotorer er enkelheden i designet og fraværet af glidende kontakter.
Indtil for nylig var den største ulempe ved sådanne motorer vanskeligheden ved hastighedsregulering, for hvis spændingen i statorkredsløbet ændres til dette, ændres drejningsmomentet kraftigt, men det var teknisk vanskeligt at ændre frekvensen af forsyningsstrømmen. Moderne mikroprocessorenheder bruges nu i vid udstrækning til at styre frekvensen af forsyningsstrømmen for at variere hastigheden af motorer — frekvensomformere.
Generatorer
Generatorer er bygget til betydelig effekt og højspænding. Ligesom asynkrone maskiner har de to viklinger. Normalt er ankerviklingen placeret i statorhuset. Induktorerne, der skaber den primære magnetiske flux, er monteret på rotoren og drives af en exciter - en lille jævnstrømsgenerator monteret på rotorakslen. I kraftige maskiner er excitationen nogle gange skabt af en ensrettet vekselspænding.
På grund af armaturviklingens ubevægelighed forsvinder de tekniske vanskeligheder forbundet med brugen af glidekontakter ved høje kræfter.
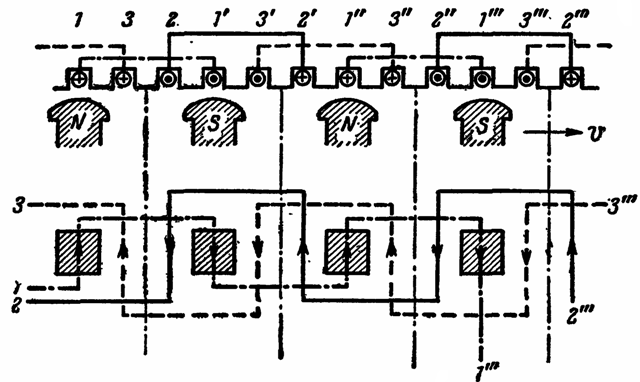
Nedenstående figur viser et skema over en enfaset generator. Dens rotor har otte poler. På disse er viklede spoler (ikke vist på figuren) tilført fra en ekstern kilde ved jævnstrøm påført slæberinge monteret på rotorakslen. Polspolerne er viklet på en sådan måde, at de tegn på polerne, der vender mod statoren, skifter. Antallet af poler skal være lige.
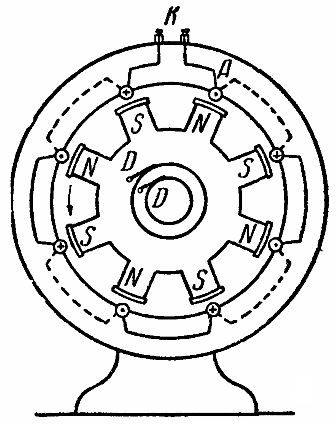
Armaturviklingen er placeret i statorhuset. Dens lange fungerende «aktive» ledninger, vinkelret på tegningens plan, er vist i figuren med cirkler, de krydses af linjerne med magnetisk induktion, når rotoren roterer.
Cirklerne viser den øjeblikkelige fordeling af retningerne af de inducerede elektriske felter. Forbindelsesledningerne, der løber langs forsiden af statoren, er vist med optrukne linjer og på bagsiden med stiplede linjer. K-klemmer bruges til at forbinde et eksternt kredsløb til statorviklingen. Rotorens rotationsretning er angivet med en pil.
Hvis du mentalt skærer maskinen langs en radius, der går mellem klemmerne K og gør den til et plan, vil den relative position af statorviklingen og rotorpolerne (side og plan) blive afbildet med en skematisk tegning:
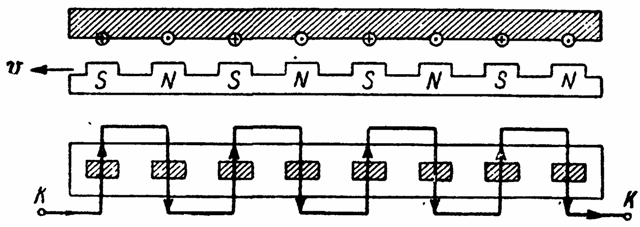
I betragtning af figuren sørger vi for, at alle de aktive ledninger (passerer gennem induktorens poler) er forbundet med hinanden i serie, og EMF induceret i dem summeres. Faserne af alle EMF'er er åbenbart de samme.Under en fuldstændig rotation af rotoren vil der blive opnået fire komplette perioder med strømændring i hver af ledningerne (og derfor i det ydre kredsløb).
Hvis en elektrisk maskine har p par poler, og rotoren roterer med n omdrejninger i sekundet, så er frekvensen af vekselstrømmen modtaget af maskinen f = pn hz.
Da frekvensen af EMF i netværket skal være konstant, skal rotorernes rotationshastighed være konstant. For at opnå en EMF af teknisk frekvens (50 Hz), kan en relativt langsom rotation anvendes, hvis antallet af rotorpoler er stort nok.
For at opnå trefasestrøm placeres tre separate viklinger i statorlegemet. Hver af dem er forskudt i forhold til de to andre med en tredjedel af bueafstanden mellem tilstødende (modsatte) poler af induktorerne.
Det er let at verificere, at når induktorerne roterer, induceres elektromagnetiske felter i spolerne forskudt i fase (i tid) med 120 °. Enderne af spolerne fjernes fra maskinen og kan forbindes i stjerne eller trekant.
I en generator er den relative hastighed af feltet og lederen bestemt af rotorens diameter, antallet af omdrejninger af rotoren pr. sekund og antallet af polpar.

Hvis generatoren drives af en vandstrøm (hydrogenerator), laves den normalt med langsomme omdrejninger. For at opnå den ønskede strømfrekvens er det nødvendigt at øge antallet af poler, hvilket igen kræver en forøgelse af rotorens diameter.
Af en række tekniske årsager kraftige brintgeneratorer de har normalt en lodret aksel og er placeret over den hydrauliske turbine, hvilket får dem til at rotere.

Dampturbinedrevne generatorer — Turbinegeneratorer er normalt højhastighedstog. For at reducere mekaniske kræfter har de små diametre og et tilsvarende lille antal poler En række tekniske overvejelser kræver produktion af turbinegeneratorer med vandret aksel.
Hvis generatoren drives af en forbrændingsmotor, kaldes den en dieselgenerator, da dieselmotorer generelt bruges som motorer, der forbruger billigere brændstof.

Generator reversibilitet, synkronmotorer
Hvis en vekselspænding påføres generatorens statorvikling fra en ekstern kilde, vil der være en vekselvirkning mellem induktorens poler med magnetfeltet af strømmen genereret i statoren, og drejningsmomenter fra samme retning vil virke på alle pæle.
Hvis rotoren roterer med en sådan hastighed, at kort efter halvdelen af vekselstrømmens periode, vil den næste pol på induktoren (modsat i fortegn til den første pol) passe ind under den betragtede ledning i statorviklingen, så vil tegnet for interaktionskraften mellem den og strømmen, som har ændret retning, vil forblive den samme.
Under disse forhold vil rotoren, der er under konstant påvirkning af drejningsmomentet, fortsætte med at bevæge sig og vil være i stand til at drive enhver mekanisme. At overvinde modstanden mod rotorens bevægelse vil ske på grund af den energi, der forbruges af netværket, og generatoren bliver en elektrisk motor.

Det skal dog bemærkes, at kontinuerlig bevægelse kun er mulig ved en strengt defineret rotationshastighed, da et accelererende moment i tilfælde af afvigelse fra den vil virke delvist på hver af rotorens poler, der bevæger sig mellem de to ledere af rotoren. stator, en del af tiden - standsende .
Motorens omdrejningshastighed skal således bestemmes strengt, — den tid, hvori polen udskiftes med den næste, skal falde sammen med strømmens halve periode, hvorfor sådanne motorer kaldes synkront.
Hvis der påføres en vekselspænding på statorviklingen med en stationær rotor, så, selvom alle rotorens poler i løbet af den første halvcyklus af strømmen oplever virkningen af drejningsmomenter af samme fortegn, er det stadig på grund af inerti rotoren vil ikke have tid til at bevæge sig. I den næste halve cyklus vil fortegnet for drejningsmomenterne for alle rotorpoler ændre sig til det modsatte.
Som et resultat vil rotoren vibrere, men vil ikke være i stand til at rotere. Derfor skal synkronmotoren først afvikles, det vil sige bringes til det normale antal omdrejninger, og først derefter skal strømmen i statorviklingen tændes.
Udviklingen af synkronmotorer udføres ved mekaniske metoder (ved lave kræfter) og specielle elektriske enheder (ved høje kræfter).
Ved små belastningsændringer ændres motorhastigheden automatisk for at tilpasse sig den nye belastning. Så når belastningen på motorakslen øges, sænker rotoren straks farten. Derfor ændres faseforskydningen mellem linjespændingen og den modsat inducerede EMF induceret af induktoren i statorviklingen.
Derudover skaber ankerreaktionen en afmagnetisering af induktorerne, så statorstrømmen stiger, induktorerne oplever øget drejningsmoment, og motoren begynder at rotere synkront igen og overvinder den øgede belastning. En lignende proces forekommer med belastningsreduktion.
Med skarpe udsving i belastningen kan denne tilpasningsevne af motoren være utilstrækkelig, dens hastighed vil ændre sig betydeligt, den vil "falde ud af synkronisme" og til sidst stoppe, mens induktions-EMK induceret i statoren forsvinder, og strømmen i den stiger skarpt. Derfor skal skarpe udsving i belastningen undgås. For at stoppe motoren skal du naturligvis først afbryde statorkredsløbet og derefter afbryde choker; når du starter motoren, skal du overholde den omvendte rækkefølge af operationer.
Synkronmotorer bruges oftest til at drive mekanismer, der arbejder med konstant hastighed. Her er fordele og ulemper ved synkronmotorer og metoderne til at starte dem: Synkronmotorer og deres anvendelser
Pædagogisk filmstrimmel - "Synchronous motors", skabt af den pædagogiske-visuelle hjælpemiddelfabrik i 1966. Du kan se den her: Filmstrip «Synchronous Motor»
