Noder af automatiske styrekredsløb som en funktion af tid
 Elektromagnetisk, elektronisk, motorisk og elektropneumatisk er meget udbredt i automatiseringskredsløb. tidsrelæ... De mest almindelige signalvarighedskonverteringsskemaer er vist i fig. 1. Diagram fig. 1, og giver en puls af en vis varighed, uanset varigheden af presningen knapper SB. Efter tryk på knappen SB aktiveres relæ K, hvilket giver en impuls til at tænde for mekanismen. Pulsens varighed bestemmes af KT-relæets tidsforsinkelse. SB-knappen kan udskiftes med et KQ kommandorelæ.
Elektromagnetisk, elektronisk, motorisk og elektropneumatisk er meget udbredt i automatiseringskredsløb. tidsrelæ... De mest almindelige signalvarighedskonverteringsskemaer er vist i fig. 1. Diagram fig. 1, og giver en puls af en vis varighed, uanset varigheden af presningen knapper SB. Efter tryk på knappen SB aktiveres relæ K, hvilket giver en impuls til at tænde for mekanismen. Pulsens varighed bestemmes af KT-relæets tidsforsinkelse. SB-knappen kan udskiftes med et KQ kommandorelæ.
Diagrammer Fig. 8, b (med elektromagnetisk tidsrelæ) og fig. 1, c (med elektropneumatisk eller motoriseret tidsrelæ) bruges til at levere en kortvarig impuls efter start af handlingen af kørekontakten SQ. I disse og efterfølgende ordninger, i stedet for kontakter bevægelseskontakt KQ relækontakter kan bruges.
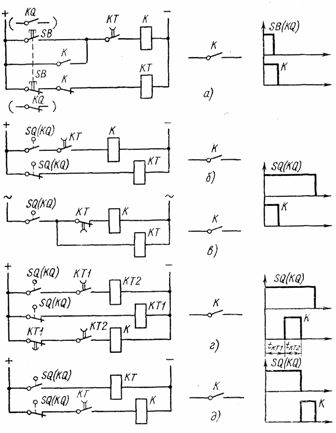
Ris. 1. Kredsløb til konvertering af varigheden af signaler
Skema fig.Id giver en impuls af varigheden tKT2 med en tidsforsinkelse tKT1 efter starten af afbryderens SQ's handling.
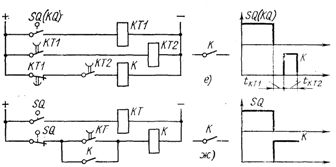
Kredsløbsknuden Fig. 1, e. Hvis der kræves en tidsforsinkelse tKT1, før denne impuls påføres, vil kredsløbet i fig. 1, e. Pulsvarigheden er tKT2.
I positionskontrolkredsløb er kredsløbet i fig. 1g, som udfører funktionen med at udstede en lang kommando efter afslutningen af stødet på udløserkontakten SQ. Kommandoen annulleres ved starten af en ny handling på SQ-kontakten.
En kort tidsforsinkelse (op til 1,5 s) kan opnås ved at tænde og slukke på en konventionel måde mellemrelæer på grund af shunting af deres spoler med kondensatorer eller dioder.
I diagrammet i fig. 2, og når kontakten KQ er lukket, aktiveres relæ K med en tidsforsinkelse bestemt af opladningstiden for kondensator C. Når KQ er lukket, vender relæ K også tilbage med en forsinkelse på grund af afladning af kondensatoren.

Ris. 2. Opnåelse af tidsforsinkelser ved at shunte spolerne af mellemrelæer med kondensatorer eller dioder
For kun at opnå en tidsforsinkelse, når relæet er tændt, skal du bruge kredsløbet i fig. 2, b. Forsinkelsen, når relæet er slukket, er praktisk talt fraværende, da kondensatoren hurtigt aflades til modstanden R (modstanden R er betydeligt mindre end modstanden af relæspolen K). Et lignende problem løses af kredsløbet i fig. 2c, som bruger en åbningskontakt på KQ-relæet. Ulempen ved dette kredsløb er det betydelige tab af energi gennem modstanden i fravær af et signal.
Skemaet i fig. 2d, hvor når kontakt KQ åbner, slukker relæ K med en tidsforsinkelse styret af modstand R.
Ifølge diagrammet i fig. 2, e skabes en tidsforsinkelse, når K er slukket, efter at kontakten på kommandorelæet KQ er lukket.
Hvis der kræves en lille forsinkelse i retur af relæ K, når kommandorelæet KQ er aktiveret, vises diagrammet i fig. 2, e, hvor spolen af relæet K er shuntet af en diode.
Skemaet til generering af impulser af en given varighed og arbejdscyklus er vist i fig. 3, a. Pulsens varighed bestemmes af KT2-relæets tidsforsinkelse, pausen bestemmes af KT1-relæets forsinkelse.
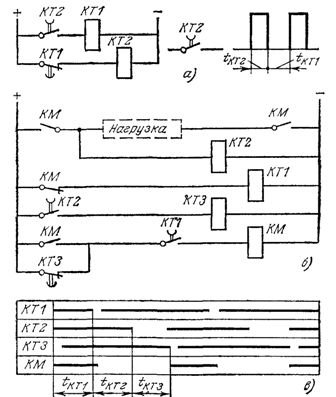
Ris. 3. Relækredsløb til generering af impulser
I fig. 3, b, er angivet et diagram over den periodiske indkobling af mekanismen med forlænget pausetid Kontaktorens KM-indkoblingstid er lig med tidsforsinkelsen for relæet KT1, pausens varighed er summen af forsinkelserne af relæet KT2 og KTZ. Tidsdiagrammet er vist i fig. 3, c.
Skema af impulsgeneratorer af tidsrelæer eller logiske elementer (se nedenfor) bruges også til at regulere drifthastigheden af lineære mekanismer. Temperaturregulatoren blev også udbredt og indeholdt en KEP-12U kommandoenhed, der på mange måder ligner et motortidsrelæ. Enheden har en executive motor, variabel gear, knasttromle, kontakt og 12 kontakter.
Hastighedsregulatorer bruger normalt skemaet til cyklisk drift af KEP-12U-enheden (fig. 4, a). Kredsløbet er lavet ved hjælp af relæerne K1 og K2 og kontakterne på kommandoenheden KT.1 og KT.2, hvis kredsløbsdiagram er vist i fig. 4, b.
Inden arbejdet påbegyndes, skal du tænde for S-kontakten.Når KQ-relækontakten kortvarigt lukkes, hvilket giver en kommando om at starte driftscyklussen, er K1-relæet aktiveret og selvlåsende. Relæ K2 aktiveres ved at tænde for kommandoenheden KT. Motorviklingerne LM1 og LM2 aktiveres, og kamtromlen begynder at rotere. Udgangskontakterne på enheden KT.3, KT.4 osv., der lukker sekventielt, på de indstillede tidspunkter (se diagrammet i fig. 4, b) giver kommandoer til at tænde for de lineære mekanismer. Midt i cyklussen åbner kontakt KT.1 og relæ K1 slukker.
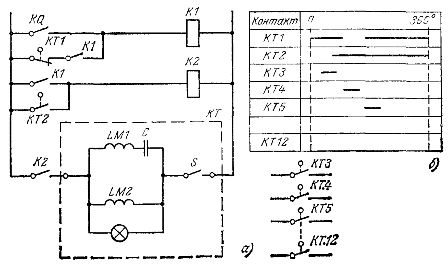
Figur 4. Linjehastighedsregulator med KEP-12U-enheden
Relæspolen K2 understøtter strømforsyningen gennem kontakten på enheden KT.2. Efter at have drejet tromlen gennem en vinkel på 360 ° åbner kontakten KT.2, motoren på KEP-12U-enheden stopper. Kæden er klar til næste cyklus.
Afslutningsvis vil vi overveje to ordninger til fjernstyring af forsinkelsen af elektromagnetiske tidsrelæer.
For at ændre forsinkelsen fra betjeningspanelet kan man bruge et to-spolet relækredsløb med triggerspoler KT.1 og returspoler KT. 2 (afmagnetisering), hvis MDS er rettet modsat (fig. 5, a). Udløserspolens MDS justeres ved hjælp af RP-potentiometeret. For at undgå gentagen betjening af CT'en, efter at magnetiseringsvendingen er returneret og udløst, skal udløsningsspolens MDS være mindre end MDS, der er tilstrækkelig til at trække ankeret, eller dens egen relælukkekontakt skal indføres i kredsløbsspolen (fig. 5, a).
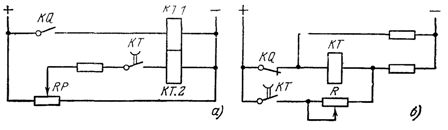
Figur 5. Skema til fjernjustering af tidsrelæforsinkelsen
Ifølge diagrammet i fig.5, b foretage en fjernændring i tidsforsinkelsen for et enkelt spolerelæ. Når kontakten KQ åbner, flyder relæspolen KT rundt med en afmagnetiseringsstrøm, som reguleres af modstanden R. Når afmagnetiseringsstrømmen stiger, aftager relæets forsinkelse og omvendt. Med en forsyningsspænding på 220 V anvendes et relæ med en spole til en nominel spænding på 110 V.