Automatiske styrekredsløb til start og stop af DC-motorer
 Starten af enhver motor ledsages af visse kontakter i strømkredsløbet og styrekredsløbet. I dette tilfælde anvendes relæ-kontaktor og berøringsfri enheder. For DC-motorer at begrænse startstrømme startmodstande indgår i motorernes rotor- og ankerkredsløb, som slukkes, når motorerne accelereres i trin. Når opstarten er færdig, omgås startmodstandene fuldstændigt.
Starten af enhver motor ledsages af visse kontakter i strømkredsløbet og styrekredsløbet. I dette tilfælde anvendes relæ-kontaktor og berøringsfri enheder. For DC-motorer at begrænse startstrømme startmodstande indgår i motorernes rotor- og ankerkredsløb, som slukkes, når motorerne accelereres i trin. Når opstarten er færdig, omgås startmodstandene fuldstændigt.
Motorernes bremseproces kan også automatiseres. Efter stopkommandoen, ved hjælp af relæ-kontaktorudstyret, foretages de nødvendige kontakter i strømkredsløbene. Når man nærmer sig en hastighed tæt på nul, afbrydes motoren fra netværket. Under opstart slås trin fra med jævne mellemrum eller afhængigt af andre parametre. Dette ændrer motorens strøm og hastighed.
Motorstartskontrol udføres som en funktion af EMF (eller hastighed), strøm, tid og vej.
Typiske underenheder og kredsløb til automatisk styring af startende DC-motorer
Start af en jævnstrømsmotor med parallel eller uafhængig excitation sker med en modstand indført i ankerkredsløbet. En modstand er påkrævet for at begrænse startstrømmen. Når motoren accelererer, bliver startmodstanden trinvist. Når starten er afsluttet, vil modstanden blive fuldstændig forbigået, og motoren vil vende tilbage til sine naturlige mekaniske egenskaber (fig. 1). Ved opstart accelererer motoren i henhold til kunstig karakteristik 1, derefter 2, og efter manøvrering af modstanden - i henhold til naturlig karakteristik 3.
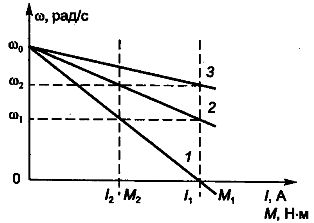
Ris. 1. Mekaniske og elektromekaniske karakteristika for en jævnstrømsmotor med parallel excitation (ω — rotationsvinkelhastighed; I1 M1 — spidsstrøm og drejningsmoment for motoren; I2 M2 — strøm og koblingsmoment)
Overvej startkredsløbsknuden for DC-motoren (DCM) i EMF-funktionen (fig. 2).
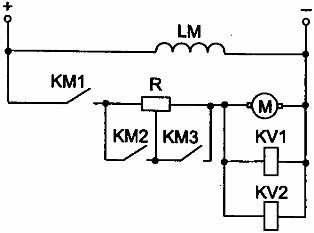
Ris. 2. Startkredsløbsknuden for DCT af parallel excitation i EMF-funktionen
EMF (eller hastighed) funktionen styres af relæer, spændinger og kontaktorer. Spændingsrelæer er konfigureret til at fungere ved forskellige anker-emf-værdier. Når kontaktoren KM1 er tændt, er spændingen på KV-relæet på starttidspunktet ikke nok til drift. Når motoren accelererer (på grund af stigningen i motor-emf), aktiveres KV1-relæet, derefter KV2 (relæaktiveringsspændingerne har tilsvarende værdier); de inkluderer accelerationskontaktorerne KM2, KMZ, og modstandene i ankerkredsløbet er shuntede (kontaktoromskifterkredsløb er ikke vist i diagrammet; LM er excitationsviklingen).
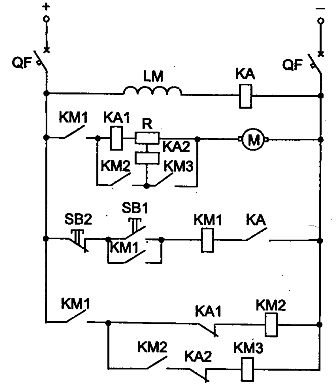
Lad os se på skemaet for start af en jævnstrømsmotor i EMF-funktionen (fig. 3). Motorens vinkelhastighed er ofte fastgjort indirekte, dvs.måle mængder relateret til hastighed. For en jævnstrømsmotor er en sådan værdi EMF. Starten udføres som følger. QF-afbryderen tænder, motorfeltet er forbundet til strømforsyningen. KA-relæet aktiverer og lukker sin kontakt.
De resterende enheder i kredsløbet forbliver i deres oprindelige position. For at starte motoren skal du tryk på knappen SB1 «Start», hvorefter kontaktor KM1 aktiveres og forbinder motoren med strømkilden. Kontaktor KM1 er selvforsynende. DC-motoren accelereres med motorens ankerkredsløbsmodstand R.
Når motorens hastighed stiger, stiger dens emk og spændingen i spolerne på relæerne KV1 og KV2. Ved hastighed ω1 (se fig. 1.) aktiveres relæ KV1. Den lukker sin kontakt i kontaktorkredsløb KM2, som udløser og kortslutter startmodstandens første trin med sin kontakt. Ved hastighed ω2 aktiveres relæ KV2. Med sin kontakt lukker den forsyningskredsløbet til KMZ-kontaktoren, som, når den aktiveres, med en kontakt, kortslutter startmodstandens andet starttrin. Motoren når sine naturlige mekaniske egenskaber og afslutter start.
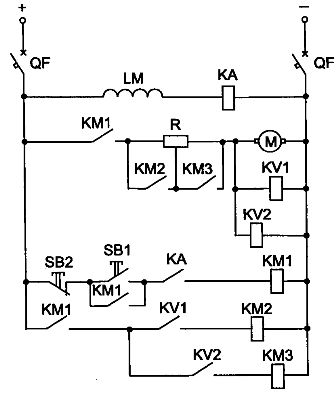
Ris. 3. Skematisk start af DCT af parallel excitation i EMF-funktionen
For den korrekte drift af kredsløbet er det nødvendigt at indstille spændingsrelæet KV1 til at fungere ved den EMF svarende til hastigheden ω1 og relæet KV2 til at fungere ved hastigheden ω2.
For at stoppe motoren, tryk på Stop-knappen SB2. For at afbryde det elektriske kredsløb skal du åbne QF-afbryderen.
Den aktuelle funktion styres af et strømrelæ. Overvej DC-motorens startkredsløbsknude i fluxfunktionen. I diagrammet vist i fig.4 anvendes overstrømsrelæer, som optager ved startstrømmen I1 og falder ud ved minimumsstrømmen I2 (se fig. 1). Den interne responstid for de aktuelle relæer skal være mindre end kontaktorens responstid.
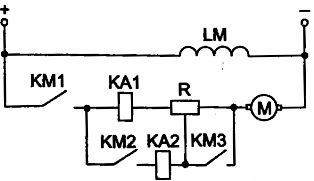
Ris. 4. Startkredsløbsknuden for den parallelle excitations-DCT afhængig af strømmen
Motoracceleration begynder med modstanden helt indsat i ankerkredsløbet. Når motoren accelererer, falder strømmen, med strøm I2 forsvinder relæet KA1 og med sin kontakt lukker forsyningskredsløbet til kontaktoren KM2, som omgår startmodstandens første kontakt med sin kontakt. På samme måde er modstandens andet starttrin kortsluttet (relæ KA2, kontaktor KMZ). Kontaktorens strømkredsløb er ikke vist i diagrammet. Ved afslutningen af start af motoren vil modstanden i ankerkredsløbet være brokoblet.
Betragt kredsløbet til start af en jævnstrømsmotor som en fluxfunktion (fig. 5). Modstandstrinenes modstande vælges således, at i det øjeblik, hvor motoren tændes og trinene shuntes, overstiger strømmen I1 i ankerkredsløbet og tidspunktet M1 ikke det tilladte niveau.
Start af en jævnstrømsmotor udføres ved at tænde for QF-afbryderen og trykke på «Start»-knappen SB1. I dette tilfælde aktiveres kontaktor KM1 og lukker sine kontakter. Startstrømmen I1 passerer gennem motorens strømkreds, under påvirkning af hvilken overstrømsrelæet KA1 aktiveres. Dens kontakt åbner, og kontaktor KM2 modtager ikke strøm.
Ris. 5. Skematisk parallel excitation DCT-opstart som funktion af strøm
Når strømmen falder til minimumværdien I2, falder overstrømsrelæet KA1 og lukker sin kontakt.Kontaktoren KM2 aktiveres og gennem sin hovedkontakt shunter den første sektion af startmodstanden og relæet KA1. Ved omskiftning stiger strømmen til værdien I1.
Når strømmen igen stiger til værdien af I1, tænder kontaktoren KM1 ikke, fordi dens spole omgås af kontakten KM2. Under påvirkning af strømmen I1 aktiveres relæet KA2 og åbner sin kontakt. Når i accelerationsprocessen falder strømmen igen til værdien af I2, falder relæet KA2, og kontaktoren KMZ tænder. Starten er færdig, motoren fungerer med sine naturlige mekaniske egenskaber.
For korrekt funktion af kredsløbet er det nødvendigt, at reaktionstiden for relæet KA1 og KA2 er mindre end kontaktorernes reaktionstid. For at stoppe motoren skal du trykke på «Stop»-knappen SB2 og slukke for QF-afbryderen for at afbryde kredsløbet.
Tidsstyringen udføres ved hjælp af et tidsrelæ og tilsvarende kontaktorer, der kortslutter modstandstrinnene med deres kontakter.
Betragt startkredsknudepunktet DC-motor som en funktion af tiden (fig. 6) Tidsrelæet KT aktiveres straks, når der opstår spænding i styrekredsløbet gennem åbningskontakten KM1. Efter åbning af kontakten KM1 mister tidsrelæet KT sin strømforsyning og lukker sin kontakt med en tidsforsinkelse. Kontaktor KM2 efter et tidsinterval svarende til tidsforsinkelsen af tidsrelæet modtager strøm, lukker sin kontakt og shunter modstanden i ankerkredsløbet.
Ris. 6. DCT-startkredsløbsknuden for parallel excitation som funktion af tiden
Fordelene ved kontrol i funktionen af tid omfatter let kontrol, stabilitet af accelerations- og decelerationsprocessen, manglende forsinkelse af det elektriske drev ved mellemhastigheder.
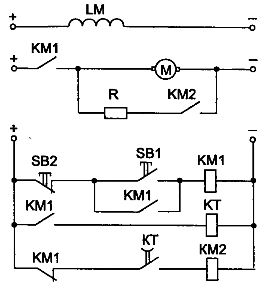
Overvej kredsløbet til start af en jævnstrømsmotor parallel excitation som en funktion af tiden. I fig. 7 viser et diagram af en irreversibel start DC parallel excitationsmotor. Lanceringen foregår i to etaper. Kredsløbet bruger knapperne SB1 «Start» og SB2 «Stop», kontaktorer KM1 ... KMZ, elektromagnetiske tidsrelæer KT1, KT2. QF-afbryderen tænder. I dette tilfælde modtager spolen på tidsrelæet KT1 strøm og åbner sin kontakt i kontaktoren KM2's kredsløb. Motoren startes ved at trykke på «Start»-knappen SB1. Kontaktor KM1 modtager strøm og forbinder med sin hovedkontakt motoren til en strømkilde med en modstand i ankerkredsløbet.
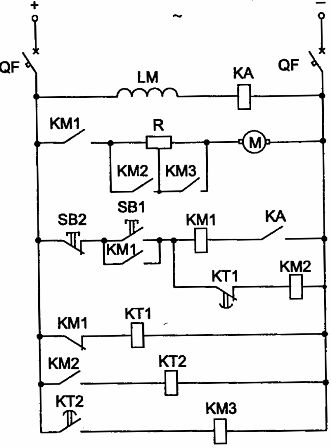
Ris. 7. Skematisk over irreversibel start af en jævnstrømsmotor som funktion af tiden
Understrømsrelæet KA tjener til at beskytte motoren mod afbrydelse af magnetiseringskredsløbet. Under normal drift aktiveres KA-relæet, og dets kontakt i KM1-kontaktorkredsløbet lukker, hvilket gør KM1-kontaktoren klar til drift. Når magnetiseringskredsløbet er brudt, slukker KA-relæet, åbner sin kontakt, derefter slukker KM1-kontaktoren, og motoren stopper. Når kontaktoren KM1 aktiveres, lukker dens spærrekontakt, og kontakten KM1 i relækredsløbet KT1 åbner, hvilket slukker og lukker sin kontakt med en tidsforsinkelse.
Efter et tidsinterval svarende til tidsforsinkelsen for relæet KT1 lukkes forsyningskredsløbet til accelerationskontaktoren KM2, som udløses og med sin hovedkontakt kortslutter et trin af startmodstanden. Samtidig aktiveres tidsrelæet KT2. Motoren accelererer. Efter et tidsinterval svarende til forsinkelsen af KT2-relæet, lukker KT2-kontakten, KMZ-accelerationskontaktoren aktiveres og kontakter med sin hovedkontakt det andet trin af startmodstanden i ankerkredsløbet. Starten er fuldført, og motoren vender tilbage til sine naturlige mekaniske egenskaber.
Typiske DC-bremsestyringsenheder
DC-motorens automatiske styresystemer bruger dynamisk bremsning, modsat bremsning og regenerativ bremsning.
Ved dynamisk bremsning er det nødvendigt at lukke motorens ankervikling til en ekstra modstand og lade excitationsviklingen være aktiveret. Denne bremsning kan udføres som en funktion af hastighed og som en funktion af tid.
Styring som funktion af hastighed (EMF) under dynamisk bremsning kan udføres i henhold til skemaet vist i fig. 8. Når KM1-kontaktoren er slukket, er motorarmaturet afbrudt fra lysnettet, men der er spænding på dens terminaler i frakoblingsøjeblikket. Spændingsrelæet KV fungerer og lukker sin kontakt i kredsløbet af kontaktoren KM2, som med sin kontakt lukker motorens anker til modstanden R.
Ved hastigheder tæt på nul mister KV-relæet strøm. Yderligere deceleration fra minimumshastighed til fuldt stop sker under påvirkning af et statisk modstandsmoment.For at øge bremseeffektiviteten kan to eller tre trin af bremsning anvendes.
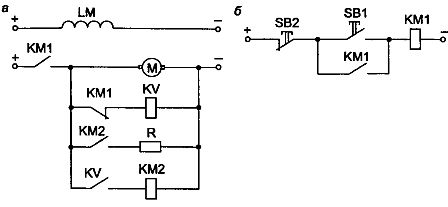
Ris. 8. Knudepunkt for kredsløbet til automatisk styring af dynamisk bremsning i EMF-funktionen: a — strømkredsløb; b — styrekredsløb
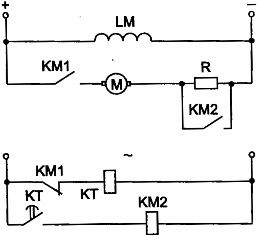
Dynamisk bremsekonstant motoruafhængig excitation som funktion af tid udføres i henhold til skemaet vist i fig. ni.
Ris. 9. Node af DCT dynamisk bremsekredsløb af uafhængig excitation som en funktion af tiden
Når motoren kører, er tidsrelæet KT tændt, men kredsløbet for bremsekontaktoren KM2 er åbent. For at stoppe skal du trykke på "Stop"-knappen SB2. Kontaktor KM1 og tidsrelæ KT mister strøm; kontaktoren KM2 aktiveres, fordi kontakten KM1 i kontaktoren KM2's kredsløb lukker, og kontakten på tidsrelæet KT åbner med en tidsforsinkelse.
Til timing af tidsrelæet modtager kontaktoren KM2 strøm, lukker sin kontakt og forbinder motorarmaturet til den ekstra modstand R. Et dynamisk stop af motoren udføres. Ved afslutningen åbner KT-relæet efter nogen tid sin kontakt og afbryder KM2-kontaktoren fra netværket. Yderligere bremsning til fuldstændig stop udføres under påvirkning af modstandsmomentet Ms.
Ved omvendt bremsning virker motorens EMF og netspændingen i overensstemmelse. For at begrænse strømmen indsættes en modstand i kredsløbet.
Excitationsstyring af DC-motorer
Motorens feltvikling har en betydelig induktans, og hvis motoren slukkes hurtigt, kan der opstå en stor spænding på den, som vil få viklingens isolering til at bryde ned. For at forhindre dette kan du bruge kredsløbsknuderne vist i fig.10. Slukningsmodstanden tændes parallelt med excitationsspolen gennem dioden (fig. 10, b). Derfor passerer strømmen kort tid gennem modstanden efter frakobling (fig. 10, a).

Ris. 10. Kredsløbsknuder til indkobling af slukningsmodstande: a — slukningsmodstand er forbundet parallelt; b — slukningsmodstanden tændes gennem dioden.
Beskyttelse mod afbrydelse af excitationskredsløbet udføres ved hjælp af et understrømsrelæ i henhold til skemaet vist i fig. elleve.

Ris. 11. Beskyttelse mod afbrydelse af magnetiseringskredsløbet: a — effektmagnetiseringskredsløb; b — styrekredsløb
I tilfælde af brud på magnetiseringsspolen afbryder relæet KA og afbryder kredsløbet til kontaktoren KM.