Motorstyringskredsløb som funktion af tid
 Denne type styring bruges, når al omskiftning i den elektriske motors elektriske kredsløb finder sted på bestemte tidspunkter, for eksempel ved automatisering af processen med at starte elektriske motorer uden at overvåge hastigheden eller strømmen. Intervallernes varighed bestemmes og kan justeres af tidsrelæindstillingerne.
Denne type styring bruges, når al omskiftning i den elektriske motors elektriske kredsløb finder sted på bestemte tidspunkter, for eksempel ved automatisering af processen med at starte elektriske motorer uden at overvåge hastigheden eller strømmen. Intervallernes varighed bestemmes og kan justeres af tidsrelæindstillingerne.
Tidsstyring fik den største spredning i branchen på grund af enkelheden og pålideligheden af masseproduktions elektromagnetiske og elektroniske tidsrelæer.
Så fra fig. 1, a og b, ses det, at ved at lukke kontakten K på liniekontaktoren, er hele modstanden af reostaten inkluderet i ankerkredsløbet, lig med R1 + R2 + R3, og inklusion af startmodstandssektionerne kan forekomme med bestemte tidsintervaller t1, t2 og t3 ved bestemte motorhastigheder n1, n2, n3 og når startstrømmen falder til den indstillede værdi I2. Tidsintervallerne er valgt således, at motorstrømmen ved hver efterfølgende kortslutning af modstanden ikke overstiger den tilladte I1.
Når motoren accelererer fra n = 0 til n1, falder strømmen til I2 som følge af en stigning i den bageste elektromotoriske kraft. Efter et tidsinterval t1 lukkes kontakt K1, shuntmodstand R1, hvilket fører til et fald i rheostatens modstand til R2 + R3, en ny stigning i strøm til I1 osv. Ved slutningen af starten accelererer motoren til den nominelle hastighed, startreostaten fjernes helt.
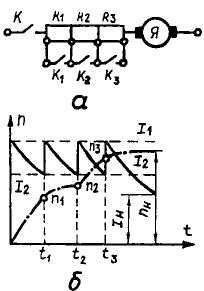
Ris. 1. Motorstyrekredsløb som funktion af tid: a — DC-motorens startreostat, b — startdiagram
Overvej nogle motorstyrekredsløb som en funktion af tiden.
Ved tidsafhængig styring af en induktionsmotor med viklet rotor (fig. 2) er den tidsforsinkelse, der kræves for at kortslutte de enkelte trin i startreostaten, tilvejebragt af pendultidsrelæer, hvis antal er lig med antallet af trin. Ordningen fungerer som følger.
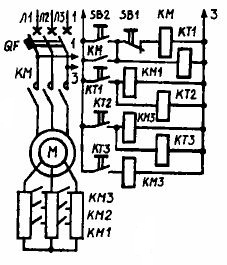
Ris. 2. Styrekredsløb som funktion af tiden for en viklet rotor induktionsmotor
Når du klikker på knap SB1 modtager strøm til kontaktorspolen på KM-ledningen, som forbinder motorstatoren til lysnettet. Samtidig er udgangsreostaten fuldt indført. Sammen med kontaktoren tændes tidsrelæet KT1, som efter et vist tidsinterval lukker kontakten i kredsløbet af kontaktoren KM1's spole.
Kontaktoren aktiverer og lukker den første sektion af reostaten for at starte rotoren. Samtidig tænder tidsrelæet KT2, som lukker sine kontakter med en forsinkelse og tænder spolen KM2 og tidsrelæet KTZ. Kontaktoren KM2 kortslutter det andet trin KM2 i startreostaten.Derudover udløses kontakten på KTZ-relæet med en tidsforsinkelse, hvilket tænder for KMZ-viklingen, hvilket laver en kortslutning af det sidste trin af KMZ-startreostaten, og motoren fortsætter med at arbejde i fremtiden, som med en egern rotor.
Motoren stoppes ved at trykke på SB-knappen, og i tilfælde af overbelastning slukkes motoren ved at slippe QF-kontakten. Dette slukker for linjekontaktoren, dens hjælpekontakt KM og alle accelerationskontaktorer og ikke-tidsforsinkelsesrelæer. Kæden er klar til næste cyklus.
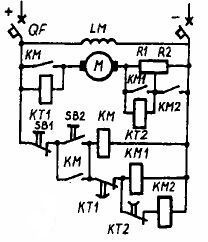
For at starte tomgangshastigheden af en induktionsmotor med øget effekt med omskiftning af statorviklingen fra en stjerne til en delta, kan du bruge diagrammet i fig. 3. Omkobling i dette kredsløb sker automatisk som funktion af tid Ved at trykke på knappen SB2 forbindes statorviklingen til netværket af kontaktoren KM. Samtidig er tidsrelæet KT og spolen KY forbundet til netværket, som forbinder statorviklingen til en stjerne ved hjælp af tre kontakter i strømkredsen.
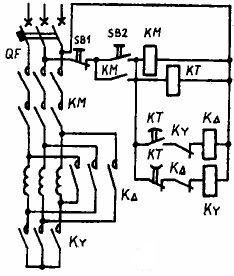
Ris. 3. Styrekredsløb som funktion af tiden for en induktionsmotor ved at skifte fra Y til Δ
Motoren starter og accelererer ved reduceret spænding. Efter et forudbestemt tidsinterval slukker KT-relæet KY-kontaktoren og tænder spolen på KΔ-kontaktoren, der forbinder statorviklingen med deltaet. Da der er en hjælpekontakt KY i spolen K∆s kredsløb, kan lukningen af kontaktoren K∆ ikke ske før lukningen af kontaktoren KMY.
Trinvis start af multi-speed induktionsmotorer er mere økonomisk og udføres som en funktion af tiden.Lad os overveje et eksempel på en trin-for-trin start af en to-hastighedsmotor med en enkelt vikling (fig. 4). Statorviklingen går fra delta til dobbeltstjerne ved dobbelt hastighed.
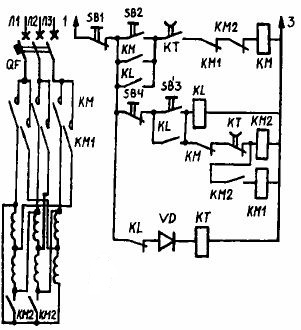
Ris. 4. Styrekredsløb som funktion af induktionsmotorens trinstarttid
Motoren tændes af kontaktor KM til det første hastighedstrin, og af kontaktorerne KM2 og KM1 til det andet. For at tænde motoren til den første hastighed, tryk på knappen SB2 tænder spolen på kontaktoren KM og dens strømkontakter KM i hovedkredsløbet. Den deltaforbundne statorvikling er forbundet til netværket. Spolen til tidsrelæet KT aktiveres, og dens lukkekontakt (i spolen KM's kredsløb) er lukket.
 En trinvis start af motoren ved den anden rotationshastighed udføres ved hjælp af et mellemrelæ K, hvis kredsløb lukkes af startknappen SB3. K-lukkekontakterne omgår de to startknapper, og K-åbningskontakten deaktiverer KT-tidsrelæet. Lukkekontakten KT i spolen KM's kredsløb slukker med en returforsinkelse, på grund af hvilken spolen KM i den første startperiode viser sig at være lukket, og motoren tænder ved den første hastighed.
En trinvis start af motoren ved den anden rotationshastighed udføres ved hjælp af et mellemrelæ K, hvis kredsløb lukkes af startknappen SB3. K-lukkekontakterne omgår de to startknapper, og K-åbningskontakten deaktiverer KT-tidsrelæet. Lukkekontakten KT i spolen KM's kredsløb slukker med en returforsinkelse, på grund af hvilken spolen KM i den første startperiode viser sig at være lukket, og motoren tænder ved den første hastighed.
Kontakten til KM-blokken i kredsløbet af spolen KM2 og KM1 åbner. Disse spoler er også afbrudt fra den åbne kontakt KT, som er forsinket ved retur. Efter en vis tidsperiode vil lukkekontakten KT slukke for spolen KM, og dens åbningskontakt tænder spolerne på kontaktorerne med den anden rotationshastighed KM1 og KM2. Deres hovedkontakter i forsyningskredsløbet vil skifte statorviklingen til dobbeltstjerne og forbinde den til lysnettet.
Derfor accelererer motoren først til første gear og skifter derefter automatisk til andet gear. Bemærk, at den foreløbige forbindelse af statorviklingen til en dobbeltstjerne og dens efterfølgende optagelse i netværket udføres først ved at tænde for to lukkekontakter på strømforsyningen KM2 og derefter tre lukkende hovedkontakter KM1. En sådan koblingssekvens opnås ved, at spolen KM1 er forbundet til spænding gennem kontakten på lukkeblokken KM2. Motoren stoppes ved at trykke på knappen «Stop», markeret på diagrammet med bogstavet SB1.
I fig. 5 viser et diagram over den automatiske start af en parallel-exciteret DC-motor som funktion af tiden. Ved at lukke QF-afbryderen er motoren klar til start. Strømmen løber gennem kredsløbet, der består af viklingen af tidsrelæet KT1, ankeret på motoren M og to trin af startreostaten R1 + R2.
Ris. 5. Styrekredsløb som funktion af tiden for en exciteret jævnstrømsmotor
På grund af den høje modstand af spolen af relæet KT1 er strømmen i dette kredsløb meget lille og har ingen effekt på motoren, men selve relæet udløses, og dets åbne kontakt i kontaktoren KM1 åbner. I spolen af det andet tidsrelæ KT2, forbundet parallelt med modstanden R1, forgrenes en så lille strøm, at den ikke kan tændes. Motorens LM-feltvikling tænder også.
Motoren startes ved at trykke på knappen SB2. Samtidig tændes kontaktoren KM og dens kontakt i motorens ankerkredsløb. Den store startstrøm begrænses af to rheostattrin R1 og R2.En del af denne strøm forgrenes ind i KT2-relæets spole, og når den aktiveres, åbner den sin KT2-kontakt i KM2-kontaktorkredsløbet. Samtidig med lukningen af ankerkredsløbet M kortslutter kontaktorens KM's arbejdskontakt relæet KT1's spole.
Efter et vist tidsinterval, når relæet vender tilbage, vil KT1 lukke sin KT1-kontakt i KM1-kontaktorkredsløbet. Denne kontaktor med sin arbejdskontakt KM1 vil kortslutte det første trin R1 af startreostaten og viklingen af tidsrelæet KT2. Med en returforsinkelse vil dens arbejdskontakter KT2 tænde for kontaktoren KM2, som med sine arbejdskontakter KM2 vil kortslutte det andet trin R2 i startreostaten. Dette afslutter motorstarten.
Når der trykkes på SB1-knappen, vil KM-kontaktoren udløse og afbryde sin hovedkontakt i ankerkredsløbet. Armaturet forbliver strømførende, men det viser sig, at det er forbundet i serie med relæspolen KT1, på grund af hvilken en lille strøm løber gennem den. Relæ KT1 vil fungere, åbne sin kontakt i kredsløbet af kontaktorer KM1 og KM2, de vil slukke og åbne deres kontakter, kortslutningsmodstande R1 og R2. Motoren stopper, men dens feltvikling forbliver forbundet til lysnettet, og dermed er motoren forberedt til næste start. Fuldstændig nedlukning af motoren sker ved at slukke for den automatiske indgangskontakt BB.
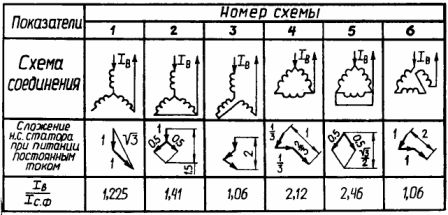
Dynamisk bremsning af motorer udføres også som en funktion af tiden. For dynamisk bremsning, for eksempel en induktionsmotor, er statorviklingen afbrudt fra vekselstrømsnetværket og er ifølge et af skemaerne vist i tabel 1 forbundet til en jævnstrømskilde.I skov- og træindustrien fås jævnstrøm fra specielle halvlederensrettere. I dette tilfælde er der ikke behov for en speciel kilde til jævnstrøm.
Når statorviklingen er tændt i henhold til et af skemaerne (se tabel 1), skabes et stationært magnetfelt i viklingen til ensretteren. I et stationært felt fortsætter motorens rotor med at rotere ved inerti. I dette tilfælde vil der blive skabt en vekslende EMF og strøm i motorens rotor, som vil excitere et vekslende magnetfelt. Rotorens skiftende magnetfelt, når det interagerer med statorens stationære felt, skaber et bremsemoment. I dette tilfælde omdannes den lagrede kinetiske energi fra rotoren og drevet til elektrisk energi i rotorkredsløbene, og sidstnævnte til varme.
Termisk energi spredes fra rotorkredsløbet til miljøet. Den varme, der genereres i rotoren, opvarmer motoren. Mængden af frigivet varme afhænger af strømmen i statorviklingen, når den forsynes med jævnstrøm. Afhængigt af den valgte ordning for at tænde for statorviklingen, når den forsynes med jævnstrøm, vil forholdet mellem strøm og fasestrøm af statoren være anderledes. Forholdet mellem disse strømme for forskellige koblingsskemaer er vist i en tabel. 1
Det dynamiske bremsekredsløb for en induktionsmotor er vist i fig. 6.
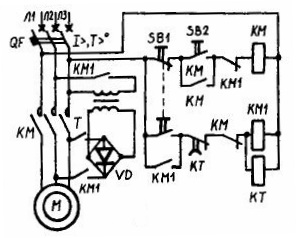
Ris. 6. Skema for dynamisk bremsning af en induktionsmotor
Ved at trykke på startknappen SB1 tænder KM-linjekontaktoren motoren til AC-netværket, dens lukkeblokkontakt skifter KM-spolen til selvforsynende.Åbningskontakten KM afbryder forsyningskredsløbet til bremsekontaktoren KM1 og tidsrelæet KT. Når der trykkes på SB-knappen, er KM-ledningskontaktoren deaktiveret, og KM1-kontaktorspolekredsløbet bliver spændingsførende.
Kontaktor KM1 inkluderer sine kontakter KM1 i kredsløbet af transformer T og ensretter V, som et resultat af hvilken statorviklingen vil blive forsynet med jævnstrøm. For at forhindre tilfældig uafhængig omskiftning af ledningskontaktoren er åbningskontakten på blokken KM1 forbundet i serie med dens spole KM. Samtidig med bremsekontaktoren tændes tidsrelæet KT, som er konfigureret således, at dens åbne kontakt KT vil slukke for spolen KM1 og tidsrelæet efter et vist tidsinterval. Tidsrelæindstillingen KT vælges således, at relæaktiveringstiden tkt er lig med summen af motorens decelerationstid tT og den korrekte kontaktor KM1 udløsningstid.