Enheder til kontrol af motorhastighed
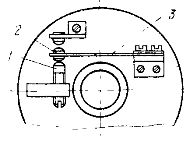
Asynkrone elektriske motorer er meget udbredt i modstrømsbremsekredsløb. induktionshastighedsreguleringsrelæ... Indgangsakslen til relæet 5, hvorpå der er monteret en cylindrisk permanentmagnet 4, er forbundet med elmotorens aksel, hvis vinkelhastighed skal styres.
Når den elektriske motor roterer, krydser magnetfeltet ledningerne i kortslutningen 3 af den roterende stator 6. En EMF induceres i viklingen, hvis værdi er proportional med akslens rotationsvinkelhastighed. Under dens indflydelse opstår der en strøm i spolen, og der opstår en vekselvirkningskraft, som har tendens til at rotere statoren 6 i magnetens rotationsretning.
Ved en vis rotationshastighed øges kraften så meget, at limiter 2, der overvinder modstanden fra den flade fjeder, skifter relækontakterne. Relæet er udstyret med to kontaktknuder: 1 og 7, som skiftes afhængigt af omdrejningsretningen.
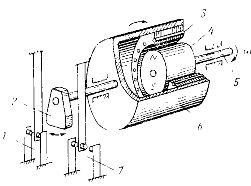
Figur 1. Induktivt hastighedskontrolrelæ
Et induktionshastighedskontrolrelæ har et ret komplekst design og lav nøjagtighed, der kun kan accepteres for grove kontrolsystemer. Højere hastighedsreguleringsnøjagtighed kan opnås ved at bruge en tachogenerator - en målemikromaskine, hvis spænding ved terminalerne er direkte proportional med omdrejningshastigheden.
Tachogeneratorer bruges i drevfeedbacksystemer med variabel hastighed med et bredt omdrejningstal og har derfor kun en fejl på få procent. De mest almindelige er DC tachogeneratorer.
I fig. 2 viser et diagram over et hastighedsreguleringsrelæ til en elektrisk motor M, der anvender en tachogenerator G, hvis ankerkredsløb omfatter et elektromagnetisk relæ K og en regulerende reostat R. Når spændingen ved tachogeneratorens ankerterminaler overstiger driftsspændingen, relæet er tændt i det eksterne kredsløb.
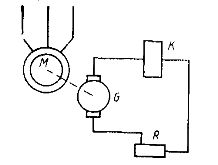
Figur 2. Hastighedskontrolrelæ med tachogenerator
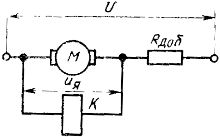
 Figur 3. Skematisk over en omdrejningstællerbro
Figur 3. Skematisk over en omdrejningstællerbro
Når modstanden af armaturkredsløbet stiger, øges nøjagtigheden af kredsløbet. Derfor er relæet nogle gange forbundet til tachogeneratoren gennem en mellemliggende halvlederforstærker. Det er også muligt at anvende berøringsfri halvleder-tærskelelementer med en stabil responsspænding til dette formål.
Kredsløbets pålidelighed kan forbedres, hvis DC-tachogeneratoren erstattes af en kontaktløs asynkron tachogenerator.
En asynkron tachogenerator har en hul ikke-magnetisk rotor lavet i form af glas. Statoren har to viklinger i en vinkel på 90° i forhold til hinanden. En af spolerne er forbundet til et vekselstrømsnetværk.En sinusformet spænding fjernes fra den anden vikling, som er proportional med rotorens hastighed. Frekvensen af udgangsspændingen er altid lig med frekvensen af lysnettet.
 I moderne DC Executive-motorer er tachogeneratoren indbygget i samme hus som maskinen og er monteret på samme aksel som hovedmotoren. Dette reducerer udgangsspændingsrippel og forbedrer nøjagtigheden af hastighedsreguleringen.
I moderne DC Executive-motorer er tachogeneratoren indbygget i samme hus som maskinen og er monteret på samme aksel som hovedmotoren. Dette reducerer udgangsspændingsrippel og forbedrer nøjagtigheden af hastighedsreguleringen.
PT-1 type DC tachogeneratorer med elektromagnetisk excitation er almindeligt anvendt i PBST serie elektriske motorer. Højt drejningsmoment DC motorer Jeg har en indbygget permanent magnet excited tacho.
I tilfælde, hvor DC-motoren M ikke har en tachogenerator, kan dens hastighed styres ved at måle armaturets EMF. Til dette bruges et tachometrisk brokredsløb, som er dannet af to modstande: R1 og R2, anker Ri og yderligere poler på maskinen Rdp. Udgangsspænding af omdrejningstællerbro Uout = U1 — Udp, eller
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
Den sidste lighed er gyldig under forudsætning af, at den magnetiske flux af den elektriske motor er konstant. Inklusive et tærskelelement ved udgangen af den tachometriske bro opnås et relæ, der er indstillet til en bestemt vinkelhastighed. Omdrejningstællerbroens nøjagtighed er lav på grund af variationen i børstens kontaktmodstand og modstandens varmeubalance.
Hvis DC-motoren arbejder på en kunstig karakteristik og en stor ekstra modstand er inkluderet i ankeret, kan hastighedsrelæfunktionen udføres af et spændingsrelæ forbundet til ankerterminalerne.
Spænding i ankeret på den elektriske motor Uja = E + IjaRja.
Da I = (U — E) / (Ri + Rext), får vi Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, så kan det andet led negligeres og ankerterminalspændingen kan betragtes som direkte proportional med emk og motorens rotationshastighed.
Figur 4. Hastighedsregulering med spændingsrelæer
 Figur 5. Centrifugalhastighedskontrolrelæ
Figur 5. Centrifugalhastighedskontrolrelæ
De har et meget enkelt design. centrifugalhastighedsafbrydere... Grundlaget for relæet er en plastisk frontplade 4, monteret på en aksel, hvis rotationshastighed skal kontrolleres. På frontpladen er fastgjort en flad fjeder 3 med en massiv bevægelig kontakt 2 og en fast justerbar kontakt 1. Fjederen er lavet af specialstål, hvis elasticitetsmodul er praktisk talt uafhængig af temperaturændringer.
Når frontpladen roterer, virker en centrifugalkraft på den bevægelige kontakt, som ved en vis rotationshastighed overvinder modstanden fra den flade fjeder og skifter kontakterne. Strøm tilføres kontaktenheden gennem slæberinge og børster, ikke vist på figuren. Sådanne relæer bruges i hastighedsstabiliseringssystemer til DC-mikromotorer. På trods af sin enkelhed holder systemet hastigheden med en fejl i størrelsesordenen 2%.
