Motorstyring som funktion af strøm
 Motorstyring kan udføres afhængigt af styrken af statorstrømmen. Startkredsløbet som funktion af strømmen af en viklet rotor induktionsmotor er vist i fig. 1 a.
Motorstyring kan udføres afhængigt af styrken af statorstrømmen. Startkredsløbet som funktion af strømmen af en viklet rotor induktionsmotor er vist i fig. 1 a.
I startøjeblikket når strømmen værdien I1, og efter et vist tidsinterval falder den til værdien I2 (fig. b). På dette tidspunkt bliver en del af startmodstanden i rotorkredsløbet automatisk kortsluttet, strømmen stiger til værdien I1, falder derefter igen til værdien I2, hvilket får en anden del af startmodstanden til at kortslutte. Denne proces gentages, indtil alle stadier af startmodstanden er kortsluttet. Til disse formål bruges et overstrømsrelæ, hvis viklinger er inkluderet i motorens strømkreds.
Når du klikker på start knap SB1 (se fig. A) aktiveres kontaktoren KM, hvis hovedkontakter forbinder motoren med netværket ved den fælles startmodstand i rotorkredsløbet. I dette tilfælde modtager KA-relæets spole strøm, hvis åbningskontakter er i kredsløbet af acceleratorspolen K1.KA-relæet indstilles således, at responstiden er kortere end K1-kontaktorens. Derudover bryder dens kontakter ved den maksimalt tilladte værdi startstrøm åben, og når strømmen falder til dens omskiftningsværdi, lukker de igen, på grund af hvilken spolen K1 tændes gennem kontakterne på relæet KA i det øjeblik, hvor startmodstandstrinnet kortsluttes.
Relæ KA vil fungere, før accelerationskontaktor K1 aktiveres, og motoren vil accelerere, når startmodstanden er fuldt indført. Når startkontaktstrømmen falder, vil KA-relæets kontakter lukke, og spolen K1 tændes. Samtidig lukker kontakten K1, hvilket giver selvforsyning af spolen uafhængigt af relæet KA, og kontakten i styrekredsløbet åbner, hvilket forhindrer for tidlig inklusion af acceleratoren K2.
Da forsyningskontakterne K1 er en del af kortslutningen af startmodstanden, stiger statorstrømmen til den maksimale værdi, og relæet KA, når det udløses, åbner sine kontakter i forsyningskredsløbet til spolen K2. Når motoren når tilstrækkelig hastighed, og statorstrømmen falder tilbage til koblingsstrømmen, vil kontakterne på relæet KA lukke og tænde spolen K2, som kortslutter det andet trin af startmodstand til dens kontakter.
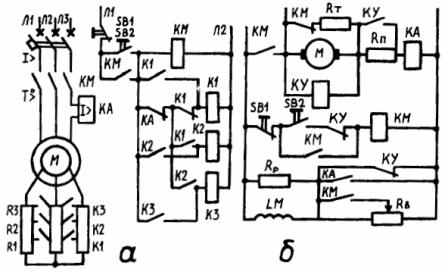
Ris. 1. Styrekredsløb afhængigt af strømmen: a — asynkronmotor med faserotor; b — DC-motor med parallel excitation
I dette tilfælde stiger statorstrømmen igen, KA-relæet vil fungere og åbne sine kontakter. Spole K2 vil ikke miste strøm, da den vil nå at lukke med hjælpekontakter K2.Et yderligere fald i statorstrømmen efter næste acceleration vil få viklingen K3 til at tænde og kortslutte det sidste trin af startmodstanden. Et tryk på SB-knappen stopper motoren, og kredsløbet er klar til næste start. Ved at bruge strømrelæerne, der er konfigureret til at returnere ved en strøm på 12, kan forskellige elektriske drev stoppes og vendes. Ulempen ved styrekredsløb i den aktuelle funktion er det ret store antal kontakter.
Til irreversibel styring af en parallel-exciteret jævnstrømsmotor på flere kilowatt kan et enkelt trin af startreostaten bruges (se fig. C). Diagrammet viser: reguleringsmodstand RB i magnetiseringskredsløbet; udladningsmodstand Rp forbundet parallelt med excitationsspolen LM; en bremsemodstand RT forbundet parallelt med ankeret M, når det er afbrudt fra netværket, og en startmodstand RP forbundet i serie til ankerkredsløbet i startperioden. For at producere maksimal flux ved opstart tændes LM-feltspolen i udgangspositionen ved fuld spænding.
Når der trykkes på SB2-knappen, kobles motorens anker fra linjekontaktoren KM i serie til netværket med modstanden RP Starterstyringsrelæet SC fungerer som funktion af ankerstrømmen. Efterhånden som strømmen øges, manipulerer KA's lukkekontakt modstanden RB, hvilket øger den magnetiske excitationsflux, og efterhånden som strømmen falder, åbner KA's kontakt, og LM-spolen forbindes i serie med modstanden af rheostaten RB, pga. hvor den magnetiske strøm aftager.
Når motoren startes, tænder den øgede startarmaturstrøm KA-relæet, og LM-spolen skaber maksimal flux. Når en vis hastighed er nået, tændes accelerationskontaktoren K, startmodstanden RP kortsluttes, hvorefter motoren fungerer i henhold til sine naturlige egenskaber. Når ankerstrømmen falder (som følge af motoracceleration), før KA-relæet aktiveres, åbnes KA-kontakten i magnetiseringskredsløbet.
LM-viklingen vil tænde i serie med RB-modstanden, hvilket får feltfluxen til at svækkes, og ankerstrømmen stiger tilsvarende. KA-relæet vil fungere igen, hvilket øger fluxen og øger samtidig motorhastigheden. Under opstart udløses rumfartøjsrelæet flere gange, indtil motoren når den hastighed, der er indstillet af RB-kontrolreostaten. En sådan vibrerende enhed, der fungerer som en strømfunktion, forenkler kredsløbet sammenlignet med styrekredsløb som en funktion af tiden.
Når motoren tændes ved at trykke på SB1-knappen, tændes ankeret fra åbningskontakten KM til bremsemodstanden RT, og dynamisk bremsning udføres automatisk. I begyndelsen af stoppet er magnetfeltet svagt svækket på grund af åbningen af KM-kontakten på skyderen til den regulerende reostat, og excitationsstrømmen passerer gennem hele modstanden RB. Efterhånden som motorhastigheden falder yderligere, deaktiveres accelerationskontaktoren K, og fluxen øges, når magnetiseringsspolen kobles til fuld netspænding gennem åbningskontakten K, hvilket resulterer i en stigning i bremsemomentet.