Styre- og strømkredsløb til løft af elektromagneter
 Løfteelektromagneter har en høj induktans, derfor bruges specielle kredsløb og kontroludstyr til hurtig og fuldstændig afladning af belastningen samt til begrænsning af overspændingen til en værdi på højst 2 kV. Elektromagneter modtager spænding fra en motorgenerator eller ensretter. Skematiske kontrolskemaer, når elektromagneter drives af et jævnstrømsnetværk, er vist i fig. 1, a og b.
Løfteelektromagneter har en høj induktans, derfor bruges specielle kredsløb og kontroludstyr til hurtig og fuldstændig afladning af belastningen samt til begrænsning af overspændingen til en værdi på højst 2 kV. Elektromagneter modtager spænding fra en motorgenerator eller ensretter. Skematiske kontrolskemaer, når elektromagneter drives af et jævnstrømsnetværk, er vist i fig. 1, a og b.
Styring løftende elektromagnet i henhold til det angivne skema udføres på følgende måde. Når controlleren K er tændt, påføres spænding til magnetiseringskontaktoren B, hvis lukkekontakter forbinder elektromagneten til netværket. I dette tilfælde løber den nominelle strøm gennem elektromagnetens spole M, og den parallelforbundne udladningsmodstand (P1 — P4, P4 — PZ og PZ — P2) flyder rundt med en strøm med lavere værdi. Kontaktorspolen H forbundet mellem punkt 6 og 7 leder ikke på grund af tilstedeværelsen af en serieforbundet åben hjælpekontakt B, åben når kontaktor B er tændt.
Når controlleren K.er slukket, lukkekontakterne på kontaktoren B åbnes, elektromagneten afbrydes kortvarigt og skiftes automatisk til omvendt polaritet, og efter at belastningen falder, kobles elektromagneten endelig fra strømkilden. Denne inklusion af elektromagneten giver afmagnetisering af belastningen, hvilket bidrager til dens hurtige fald.
Den automatiske handling, når elektromagneten er slukket, er hovedsagelig tilvejebragt af betjeningen af den afmagnetiserende kontaktor H. Spændingen ved terminalerne på spolen af kontaktor H bestemmes af spændingsfaldet i modstandssektionerne 6 — P4 og P4—7 . Når elektromagneten er slukket, forsvinder dens strøm ikke med det samme, men lukkes af et kredsløb af udladningsmodstande. Modstandene i sektionerne 6 — P4 og P4—7 er valgt på en sådan måde, at kontaktoren H tændes, efter at regulatoren K er slukket og åbningskontakten B er lukket.
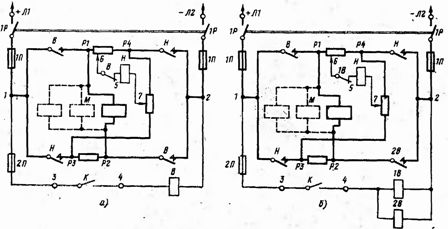
Ris. 1. Skematiske kontrolskemaer for magnetiske styreenheder PMS 50 (a) og PMS 150 (b) til løft af elektromagneter: V eller 1V, 2V-bipolær magnetiseringskontaktor eller to unipolære; H — to-polet afmagnetiseringskontaktor; 1P — switch; 1P, 2P — sikringer af strømkredsløbet og styrekredsløbet; K — kommandokontrollant; M - elektromagnet; P1-P4, P4-P3 og P3-P2-afladningsmodstande.
Efter tænding af kontaktor H lukkes dens strømkontakter, og elektromagneten er forbundet til netværket. I dette tilfælde ændres retningen af strømmen i elektromagnetens spole og i modstanden 6-P4 forbundet i serie med spolen over tid til det modsatte. Ændringen i strømmens retning i sektionen af modstand 6 — P4 sker med en foreløbig reduktion af den tidligere modsat rettede strøm til nul.Ved nulstrøm i afsnit 6 — P4 forbliver kontaktor H tændt, fordi spændingsfaldet i afsnit P4—7 er tilstrækkeligt til dette (i afsnit 6 — P4 er spændingsfaldet nul).
Når strømmens retning ændres i sektionen 6 — P4, slukkes kontaktoren H, fordi dens spole viser sig at være forbundet med forskellen i spændingsfaldet i sektionerne 6 — P4 og P4 — 7. Afbrydelsen af kontaktoren H opstår, når afmagnetiseringsstrømmen når en værdi svarende til 10-20% af driftsstrømmen af elektromagnetens kolde spole, dvs. praktisk talt efter afmagnetisering og tab af belastning.
Når den er slukket, afbryder kontaktor H magnetspolen fra nettet, som forbliver lukket til afladningsmodstanden. Dette gør det lettere at bryde lysbuen fra kontaktoren og reducerer overspænding, hvilket øger spoleisoleringens levetid. Den åbnende hjælpekontakt på kontaktor B (i spolekredsløbet på kontaktor H) forhindrer samtidig drift af begge kontaktorer.
Kredsløbet giver dig mulighed for at justere afmagnetiseringstiden, hvilket kan gøres ved at flytte modstandsklemmerne, det vil sige ved at ændre modstandsværdierne i afsnit 6 — P4 og P4—7. Samtidig justeres denne tid automatisk afhængigt af, hvilken type byrde der løftes. Med en større masse af belastningen er dens magnetiske ledningsevne større, hvilket fører til en stigning i tidskonstanten for elektromagneten og dermed en stigning i afmagnetiseringstiden. Med en let vægt af lasten reduceres afmagnetiseringstiden.
I henhold til det beskrevne skema produceres magnetiske controllere af typerne PMS 50, PMS 150, PMS50T og PMS 150T.
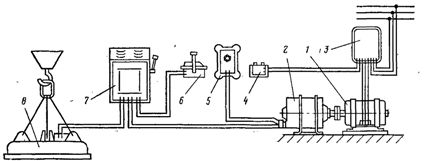
Ris. 2.Elektrisk kredsløb af kranens løfteelektromagnet i nærvær af et vekselstrømsnetværk: 1 — asynkron elektrisk motor; 2 — tilstrækkelig strømgenerator; 3 - magnetisk starter; 4 — kontrolknap; 5 — excitationsregulator; 6 — kommandoleder; 7 — magnetisk controller; 8 — løftende elektromagnet.
De fleste kraner med løftemagneter er vekselstrømsdrevne, så der skal bruges en motorgenerator eller ensretter til DC-magneter. I fig. 2 viser forsyningskredsløbet for løfteelektromagneten fra motorgeneratoren. Generatorbeskyttelse mod kortslutningsstrømme. et spændingsrelæ af typen REV 84 er ført i kablet, der forsyner elektromagneten.
Udskiftning af roterende omformere med statiske omformere reducerer kapitalomkostninger, elektrisk vægt og driftsomkostninger. Den magnetiske styreenhed af typen PSM 80 i kombination med KP 1818 sessyn styreenheden muliggør justering af lastkapaciteten. Dette er af stor betydning i arbejder relateret til efterbehandling, sortering, mærkning og transport af metalplader i metalværker samt i forskellige lagre og baser.
I fig. 3 viser et diagram af en magnetisk styreenhed PSM 80 med en statisk styret omformer. Konverteren er lavet i henhold til et transformerløst trefaset fuldbølgekredsløb med en tyristor og en udladningsdiode. Strømregulering udføres ved at ændre konverterens udgangsspænding ved at ændre tyristorens åbningsvinkel. Tyristorens åbningsvinkel afhænger af referencesignalet, som er trinløst indstilleligt over et bredt område af den synkrone styreenhed.
Supply I bruger en tre-vindet transformer.36 V viklingen bruges til at forsyne relæelementerne, selvin excitationsspændingen af controlleren fjernes fra 115 V viklingen Strømforsyningen inkluderer en enfaset ensretter D7-D10, på hvis udgang zenerdioder St1-St3 og en ballastmodstand R2 er installeret.
Den stabiliserede forsyningsspænding af relæelementet 16,4 V fjernes af zenerdioderne St2 og St3. I dette tilfælde løber en fremadgående strøm gennem modstanden R3 og bunden af transistoren T1, som tænder transistoren. Fra zenerdioden St1 påføres en negativ forspænding (-5,6 V) til bunden af transistoren T2 for at slukke den, når transistoren T1 er åben.
Blok opgave II består af Selsinainkluderet i selsyny controlleren og enfaset ensretter D11-D14. Selsyn-rotorens linjespænding påføres broindgangen, som ændres, når den roterer i forhold til statoren. Rotoren drejes af håndtaget CCK Ved broens udgang opnås en skiftende ensrettet spænding, i forhold til hvilken udgangsstrømmen, der løber, når transistoren T1 er åben, gennem sin base og modstand R6, også ændres. Relæelementet er samlet på to p-p-p transistorer.
For at tilvejebringe fasestyringstilstand i kredsløbet er der tilvejebragt en savtandspændingskilde, som er et RC-kredsløb, som shuntes af tyristoren T. Mens tyristoren er lukket, oplades kondensatorerne C4 C5. Når tyristoren T åbner, sker der en hurtig afladning af kondensatorerne. Savstrømmen løber gennem modstand R13 og bunden af transistor T1.
Selsinki-controlleren har én fast position (nul) og giver en bremsetilstand ved enhver mellemposition af kontrolhåndtaget.I dette tilfælde svarer en vis værdi af den elektromagnetiske strøm til hver position af rotoren selsyn. I kontrolpositionerne opretholder kredsløbet med tilstrækkelig nøjagtighed den gennemsnitlige værdi af elektromagnetstrømmen, når dens spole opvarmes. Strømtolerancerne for kold og varm spole overstiger ikke 10 %, og den maksimale strømværdi for opvarmet spole overstiger ikke katalogværdien for strøm med mere end 5. Når forsyningsspændingen svinger i området (0,85 - 1,05) UH, ændringen i elektromagnetens strøm overstiger ikke de specificerede grænser.
DC-sidekoblingskredsløbet inkluderer:
• to-polede kontaktorer til direkte KB og omvendt CV elektromagnetomskiftning;
• to tidsrelæer РВ og РП til at styre afmagnetiseringsprocessen af elektromagneten under nedlukning,
• afladningsmodstande R19 — R22 for at begrænse den overspænding, der opstår, når elektromagneten slukkes;
• diode D4 for at reducere udladningsmodstandenes effekt.
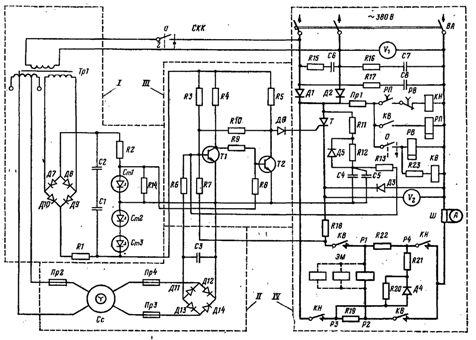
Ris. 3. Skema til justering af elektromagnetens lastbærende kapacitet: I - strømforsyningsblok: II - opgaveblok; III — relæelement; VI — strømkredsløb; R1 — R25 — modstande; C1 — C8 — kondensatorer, W — shunt; VA — automatisk omskifter; D1 -D16 — dioder; KV og KN — kontaktorer med direkte og omvendt vikling af en elektromagnet (magnetisering og afmagnetisering); РВ og РП — tidsrelæ til styring af afmagnetiseringsprocessen, Pr1 — Pr4 — sikringer; Сс — controller selsyn; St1 -St3 — zenerdioder; T - tyristor: T1, T2 - transistorer, TP1 - transformer; EM — løftende elektromagnet; SKK — selsyn kontrolcontroller.
Hvis kablet, der føder elektromagneten, går i stykker, er det nødvendigt at slukke for kontakten eller afbryderen på den magnetiske controller. Det er strengt forbudt at være under en vandhane med en fungerende elektromagnet. Eftersyn og udskiftning af enheder skal udføres med hovedafbryderen på vandhanen slukket.
Alle elektriske enheder skal være forsvarligt jordet. Vær særlig opmærksom på jording af elektromagneten. Jordbolten i magnetboksen er forbundet til jordbolten på det magnetiske styreskab. Tilslutningen er lavet af en af kernerne i det tre-leder strømkabel. Ellers bør betjeningen af elektrisk udstyr være styret af de generelle sikkerhedsregler for servicering af elektriske installationer.