Motorstyringskredsløb som funktion af hastighed
 Ved motorstyring overvåges hastigheden som en funktion af motorrotorhastigheden for at påvirke de tilsvarende styreelementer, når den ændres.
Ved motorstyring overvåges hastigheden som en funktion af motorrotorhastigheden for at påvirke de tilsvarende styreelementer, når den ændres.
Hastighedskontrolrelæer eller små elektriske målegeneratorer kan bruges i motorstartstyrekredsløb. De bruges dog ekstremt sjældent til disse formål på grund af designets kompleksitet, høje omkostninger og utilstrækkelig pålidelighed. Derfor styres motorhastigheden ved indirekte metoder. I asynkrone og synkrone motorer styres rotationsfrekvensen af rotorstrømmens emk og frekvens, og i jævnstrømsmotorer af anker-emk.
I fig. 1, a og b viser skemaer for automatisk start af en parallel-exciteret jævnstrømsmotor afhængig af omdrejningsfrekvensen og afhængig af EMF og ankerspændingen fra starttidspunktet. Styringen af rotationsfrekvensen udføres ved at måle motorens EMF, som varierer i forhold til rotationsfrekvensen.
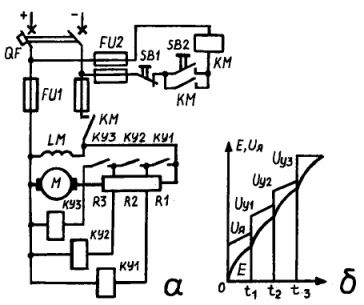
Ris. 1.Styrekredsløb som funktion af hastighed: a og b — kredsløb og startdiagram for en parallel-exciteret DC-motor
Da EMF er proportional med motorhastigheden, udføres den automatiske indtastning af individuelle trin af startreostaten ved en vis størrelse af aktiveringsspændingen af accelerationskontaktorerne KM1, KM2 og KMZ, som hver er indstillet til en vis tilbagetrækning værdi. Ved at trykke på starteren knapper SB2 tænder for KM linjekontaktoren. Alle modstande R1, R2, R3 vil være forbundet i serie med ankerviklingen og vil begrænse strømmen.
Ved en vis hastighed n1 er spændingen Uy1 af spolen på kontaktoren K1

hvor Her Dette er koefficienten for maskinen.
Når Uy1 vil være lig med pull-down spændingen, vil kontaktoren KM1 fungere og kortslutte modstanden R1. En yderligere stigning i omdrejningshastigheden indtil rotationen af n2 og n3 vil føre til en stigning i spændingen på kontaktorernes K2 spoler og en kortslutning til værdier


I dette tilfælde vil kontaktorerne K2 og kortslutningen arbejde i serie og kortslutte modstandene R2 og R3. Efter kortslutning af modstanden R3 vil startprocessen være afsluttet, og motoren kan køre i lang tid.
EMF i induktionsmotorens rotorkredsløb er proportional med slip, dvs. E2s = E2s. Her er E2 emk af en stationær rotor.
Jo lavere slip, jo lavere EMF, det vil sige, jo højere motorrotorhastighed. Til styring af start af AC-motorer med en viklet rotor anvendes relæer, der styrer værdien af EMF i rotorkredsløbet.De tilsvarende enheder (relæer, kontaktorer), der kortslutter startmodstande, justeres til disse spændinger.
Til styring af viklede induktionsmotorer og synkronmotorer kan frekvensmetoden også bruges som funktion af hastighed. Denne metode er baseret på den kendte afhængighed af frekvensen af rotorstrømmen f2 af rotationsfrekvensen af statorfeltet n0 og rotoren n2, dvs.
Da hver rotorhastighed svarer til en bestemt f2-værdi, vil et relæ indstillet til denne frekvens og forbundet til motorrotorkredsløbet virke på kontaktorspolekredsløbet. Kontaktoren vil kortslutte modstandstrinene ved en given hastighed.
Bremsning af modsatte motorer udføres afhængigt af hastigheden hastighedskontrolrelæ SR. I fig. 2 viser a, b eksempler på stop af asynkronmotorer ved modsætning.
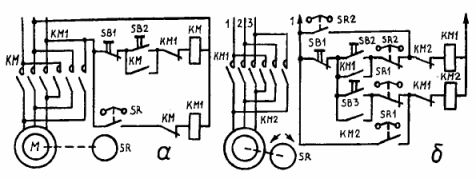
Ris. 2. Skemaer til stop af asynkronmotorer ved hjælp af opposition: a — ikke-reversibel; b - reversibel
Lad os tage et kig på, hvordan disse ordninger fungerer.
Ved at trykke på SB2-knappen tændes spolen på kontaktoren KM (se fig. 2, a), som lukker strømkontakterne og blokerer SB2-knappen. Samtidig afbryder kontakten af åbningsblokken KM i kredsløbet af spolen til bremsekontaktoren KM1 og hastighedskontrolrelæet SR dem fra netværket. Når motorrotoren når en vis hastighed, vil SR-kontakten lukke, men dette vil ikke længere få KM1-kontaktoren til at fungere. Motoren fortsætter med at køre normalt.
Standsning af motoren med en modkoblingsbremse sker ved at trykke på SB-knappen.Samtidig neutraliseres spolen på kontaktoren KM, og dens hovedkontakter forsvinder og afbryder motoren fra netværket. KM-åbningskontakten i bremsekontaktorkredsløbet på KM1 vil lukke. Da kontakten til hastighedsreguleringsrelæet SR i dette øjeblik er lukket, hovedkontakterne på bremsekontaktoren straks tændes og statorviklingen skiftes til omvendt, vil magnetfeltet begynde at rotere i den modsatte retning, dvs. rotationen af rotoren og motoren vil blive stoppet ved modkobling. Rotorens hastighed falder, og ved en vis lille værdi vil dens kontakter på RKS hastighedskontrolrelæet åbne og afbryde motoren fra lysnettet.
Ved omvendt styring med modsat opbremsning (fig. 2, b) startes motoren fremad ved at trykke på knappen SB1, som ved at lukke kredsløbet af spolen til kontaktoren KM1 sikrer, at motoren tilsluttes netværk. Motorrotoren vil begynde at rotere, og når den når en vis hastighed, lukker hastighedsreguleringsrelæets lukkekontakt SR1, og åbningskontakten SR2 åbner.
Tænd for spolen på kontaktor KM2 vil ikke ske, fordi åbningskontakten på kontaktor KM1 har brudt sit kredsløb. I denne position vil motoren fortsætte med at køre, indtil der trykkes på SB-knappen. Når der trykkes på SB-knappen, slukkes kredsløbet for spolen KM1. Dette vil lukke afbrydelseskontakten KM1, og spolekredsløbet på kontaktoren KM2 vil modtage strøm.
Motorens statorvikling vil gå i indgreb for at vende. Da rotoren fortsætter med at rotere i samme retning ved hjælp af inerti, opstår modstandsbremsning.Når hastigheden falder til en vis lille værdi, åbner hastighedsreguleringsrelæet sin kontakt SR1, kontaktoren KM2 vil slukke og afbryde motoren fra netværket.
For at starte motoren i bakgear, tryk på SB2-knappen. Hele processen vil ligne den, der er beskrevet. Nu spilles bremsekontaktorens rolle af KM1-kontaktoren, og SR2-kontakterne på hastighedskontrolrelæet vil styre bremseprocessen.
Automatisk start af en synkronmotor er forbundet med velkendte vanskeligheder, da det i dette tilfælde ikke kun er nødvendigt at begrænse startstrømmen, men også at synkronisere maskinen med netværket.
Styrekredsløbet for en laveffekt synkronmotor er vist i fig. 3. Indkoblingsstrømbegrænsning er tilvejebragt af aktive modstande inkluderet i statorviklingen. Inden du starter motoren, skal du tænde for de automatiske indgangskontakter QF og QF1 på AC- og DC-nettet, som giver maksimal og termisk beskyttelse. Ved at trykke på startknappen SB2 tændes spolen på kontaktoren KM, og statorviklingen af synkronmotoren gennem hovedkontakterne på KM er forbundet til netværket gennem startmodstandene Rn. Spolen er selvlåsende, og dens kontakt i DC-kredsløbet inkluderer låserelæet KV, hvis lukkekontakt forbereder kontaktorernes K1 og K2 spoler til at tænde.
Frekvensrelæerne KF1 og KF2 i LM-rotorens magnetiseringskredsløb fungerer afhængigt af motoromdrejningstallet Ved opstart, når rotorslipningen er størst, åbner relæernes KF1 og KF2 brudkontakter.Åbningen af spolerne sker, før KV-blokeringsrelæet tænder, og K1-spolen vil ikke modtage strøm. Relækontakterne KF1 og KF2 lukker igen, når motorens omdrejningstal når ca. 60-95 % synkront i overensstemmelse med relæregulering.
Efter lukning af kontakterne på relæet KF1 vil spolen på kontaktoren K1 tænde, dens kontakter i hovedkredsløbet vil kortslutte startmodstandene Rp, og statoren vil tænde til fuld linjespænding. Når de åbne kontakter på relæet KF2 er lukket, oprettes et kredsløb til at forsyne spolen til kontaktoren K2, uafhængigt af kontaktoren K1, åbner dens kontakt med en hastighed på ca. 60% af den synkrone hastighed.
Kontaktor K2 har to viklinger: en hovedvikling, der trækker KM1 og den anden vikling KM2, designet til at udløse låsen, som er forsynet med kontaktoren. Efter at optagespolen KM1 er tændt, lukker lukkekontakterne K2 i magnetiseringskredsløbet, og åbningskontakterne K2 åbner, hvorved rotorviklingen afbrydes fra afgangsmodstandene R1 og R2 og rotoren forbindes med DC-netværket.
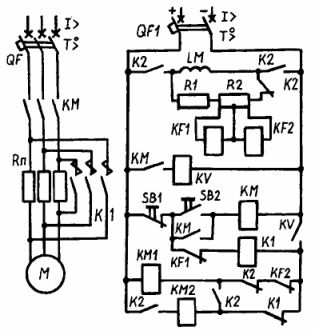
Ris. 3. Synkronmotorstyringsskema
Kontaktoren K2's kontakter fungerer i følgende rækkefølge. N/O-kontakt K2 åbner i forsyningskredsløbet til pickup-spolen, men blokeringen holder kontaktoren aktiveret. Lukkekontakterne K2 lukker i forsyningskredsløbet til de to spoler og i kredsløbet af spolen KM2, hvilket forbereder kredsløbet til efterfølgende indkobling. Spole K2 vil blive afbrudt, så snart låsemekanismen frigøres fra spole KM2. Motoren afbrydes fra lysnettet ved at trykke på knappen SB1.Spole K1 udløser sin åbningskontakt i kredsløbet af spole KM2, som udløser låsen og slukker for spole KM1, hvorefter kredsløbet vender tilbage til sin oprindelige position.