Kontaktorstyring og motorbeskyttelseskredsløb
 Afhængigt af den funktion, der skal udføres, er der forskellige kontaktormotorstyrekredsløb.
Afhængigt af den funktion, der skal udføres, er der forskellige kontaktormotorstyrekredsløb.
Figur 1a viser et kombineret skema af en irreversibel magnetisk starter... I den falder arrangementet af elementer sammen med arrangementet i naturen, det vil sige, at alle elementerne i startboksen er grupperet på venstre side af diagrammet, og trykknapstation med «Start» og «Stop» knapper vist i højre side af diagrammet.
Knapstationen er normalt placeret et stykke fra magnetisk starter… For at forstå princippet for driften af motorstyrekredsløbet bruges der sædvanligvis detaljerede (grundlæggende) diagrammer (fig. 1.b). Ved at trykke på startknappen SB2 lukkes KM-kontaktorspolekredsløbet, som omfatter tre KM-kontakter til motorforsyningskredsløbet. I dette tilfælde lukker blokkontakten KM parallelt med startknappen SB2 også. Dette giver dig mulighed for at aktivere KM-spolen, når SB2-knappen slippes.
Motoren stoppes ved at trykke på SB1-knappen, mens spolen slukker og frigiver strøm- (hoved)kontakterne og hjælpekontakten. Når SB1-knappen slippes, vil spolen KM's kredsløb blive deaktiveret. For at genstarte motoren skal du trykke på SB2-knappen igen.
Dette kredsløb giver også den såkaldte nulbeskyttelse, det vil sige, hvis netspændingen forsvinder eller falder til 50-60% af den nominelle, vil KM-spolen ikke holde KM-strømkontakterne, og motoren vil blive slukket. Når en spænding vises eller stiger til en værdi tæt på den nominelle værdi, vil den magnetiske starter ikke gå i indgreb spontant. For at tænde den skal du trykke på startknappen igen.
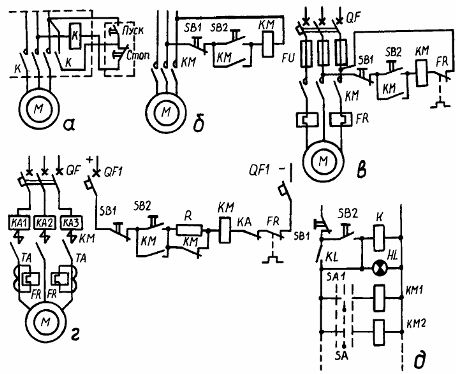
Ris. 1. Motorstyrings- og beskyttelsesskemaer: a — kombineret og b — detaljeret skema for en irreversibel magnetisk starter; c — motorbeskyttelse ved hjælp af sikringer og termiske relæer; d — diagram over den kraftige motorkontrolstation; d — nul beskyttelse fra et mellemrelæ
Beskyttelse af motoren mod overophedning af viklingen udføres under langvarige overbelastninger termiske relæer FR, og beskyttelse mod store overbelastninger eller kortslutninger ydes af sikringer FU el afbrydere QF (fig. 1, c). For at beskytte mod langvarige overbelastninger bruges to termiske relæer, da med et relæ, i tilfælde af en sprunget sikring, i serie med hvilken varmeelementet på dette relæ er forbundet, vil motoren være forbundet til et enfaset netværk og de vil ikke blive beskyttet. Disse relæers brydekontakter er forbundet i serie med startspolen. Når en af dem åbner, afbrydes KM-spolen, og motoren stopper, som når der trykkes på SB1-knappen.
En motorkontrolstation med høj effekt er vist i fig. 1, d. Kortslutningsbeskyttelse ydes af overbelastningsrelæet KA1 — KA3, overbelastningsbeskyttelse ydes af termiske relæer FR forbundet gennem strømtransformatorer. Spolen på en tre-polet kontaktor forsynes med jævnstrøm. For at reducere strømmen i kontaktorspolen efter dens optagelse i kredsløbet indføres en ekstra modstand R, som tidligere blev kortsluttet af den åbne kontakt KM.
I manuelle styrekredsløb med flere controllere, kontakter eller andre enheder bruges mellemrelæer til at give neutral beskyttelse. (Fig. 1, e) For at påføre spænding til styrekredsløbet skal du trykke på knappen SB2 og derved tænde for mellemrelæet K, som inkluderer dets lukkekontakt K og signallampen HL, hvilket indikerer tilstedeværelsen af spænding i styrekredsløbet . Efter frigivelse af SB2-knappen vil relæspolen blive blokeret, mens kredsløbene i SM1-controlleren, SM-pakkeomskifteren osv. og spolerne på kontaktorerne KM1, KM2 osv. vil blive spændingsførende.
I de betragtede ordninger er de selvlåsende kontakter nødvendige for den kontinuerlige drift af motorerne. Ofte skal motoren i praksis kun køre, når der trykkes på startknappen, for eksempel i løftemaskiner. I dette tilfælde er der ingen stopknap i styrekredsløbet (fig. 2, a). Nogle gange er det nødvendigt at sikre driften af drevet i to tilstande, det vil sige at tænde det i kort tid ved opsætning af maskinen eller i en længere periode. Derefter, med et kort tryk på knappen SB2 (fig. 2.b), vil spolen på kontaktoren KM tænde, og den selvlåsende kontakt på KM vil lukke, mens motoren kører, når knappen SB2 slippes .
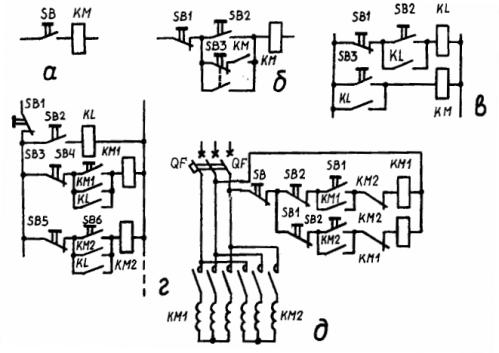
Ris. 2. Typer af styrekredsløb til asynkronmotorer: a — i jogging-tilstand; b og c — under længerevarende arbejde og jogging; d — samtidig medtagelse af flere motorer; d — trinløs start af en to-gears motor
For motorstyringstilstand skal du trykke på SB3-knappen, dens lukkekontakt tænder spolen på kontaktoren KM, og åbningskontakten bryder kontaktorens selvlåsende kredsløb. Ulempen ved dette kredsløb er, at den åbne kontakt på SB3-knappen kan lukke, før kontakten på KM-blokken åbner, og motoren ikke slukker. Kredsløbet vist i fig. 2, f, er fri for denne mangel.
For kontinuerlig drift tændes mellemrelæet K ved at trykke på SB2-knappen. En af kontakterne K tænder spolen på kontaktoren KM, og den anden blokerer samtidigt SB2-knappen og slukker derved for driften af motoren med startknappen frigivet. For at starte betjeningen skal du trykke på SB3-knappen og holde den nede i den ønskede tid.
Figur 2d viser et skema til start af flere motorer på samme tid fra en startknap ved hjælp af et mellemrelæ ... Knap SB2 tænder relæ K, hvis lukkekontakter samtidig tænder spolerne på kontaktorer KM1, KM2 osv. Stop alle motorer samtidigt med SB1-knappen. For at tænde og slukke for hver motor individuelt, skal du bruge henholdsvis knapperne SB3, SB4 og SB5, SB6 osv.
Et trinløst startdiagram af en to-hastigheds to-vindet egern-burrotormotor vist i fig. 2, e. For at starte motoren ved den første hastighed bruges knappen SB1, ved den anden - SB2.Begge knapper er mekanisk låst for at forhindre, at motoren går i to hastigheder på samme tid.
Starterkredsløbene er også blokeret elektrisk. Så når for eksempel spolen KM1 aktiveres, bryder åbningskontakten kredsløbet af spolen KM2, udelukker muligheden for dens medtagelse. For at skifte til den anden hastighed skal du trykke på knappen SB2, mens kredsløbet af spolen KM1 er brudt, og det slukker. Spolen i KM2-kredsløbet modtager strøm og tænder motoren ved anden hastighed.
Omvendt styring af asynkronmotorer udføres ved hjælp af to kontaktorer (fig. 3, a).
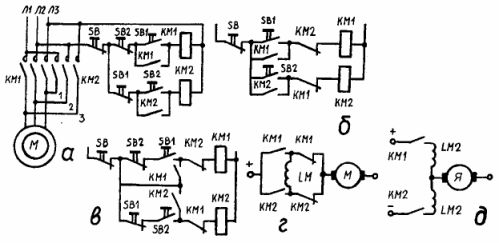
Fig. 3. Motorstyringsskemaer: a — reversibel magnetisk starter med mekanisk blokering; b — det samme med elektrisk blokering; c — en kombination af muligheder a og b; d og e — start og reversering af laveffekt DC-motorer
Kontaktor KM1 bruges til at koble motoren fremad og KM2 bruges i bakgear. For at forhindre utilsigtet samtidig tænding af de to kontaktorer, hvilket fører til en kortslutning, bruger kredsløbet (se fig. 3, a) gensidig mekanisk blokering med to afbrydelseskontakter på knapperne SB1 og SB2. Tryk på knappen SB1, tænd kredsløbet af spolen KM1 og afbryd spolen kredsløb KM2.
Når knapperne SB1 og SB2 trykkes ned samtidigt, er kredsløbene i spolerne KM1 og KM2 brudt, og ingen af kontaktorerne vil tænde. Blokering udføres af to afbrydelseskontakter KM2 og KM1, inkluderet i kredsløbene af henholdsvis spolerne KM1 og KM2 (fig. 3, b). For at vende motoren i denne ordning skal du først trykke på SB-knappen.
Kredsløbet i fig. 3, c er en kombination af de to foregående kredsløb, det vil sige, at der er dobbelt blokering.SBI-knappen tænder kontaktoren KM1, og kredsløbet af spolen af kontaktoren KM2 brydes af den samtidig åbne kontakt af knappen SB1 og kontakten af blokken KM1.
Figur 3, d og e viser de enkleste skemaer til at starte og vende laveffekt sekventielt exciterede motorer ... Sådanne motorer er forbundet til netværket uden at starte reostater. Ifølge diagrammet i fig. 3, d, udføres start og reversering af motoren med serieaktivering ved hjælp af to mellemrelæer. Motoren vendes ved at vende retningen af strømmen i LM-feltspolen. I motorer med to seriefeltviklinger, der skaber magnetiske fluxer i modsatte retninger, har koblings- og reverseringskredsløbet kun to kontaktkontakter (se fig. 3, e).
Som det kan ses af de overvejede kontrolskemaer, er det nemmest at automatisere processen med at starte og vende egern-burrotor asynkronmotorer. I dette tilfælde er al kontrol ved start reduceret til at forbinde motoren til strømnettet, og ved stop - til afbrydelse af netværket.
Mere kompleks er automatiseringen af start, stop og stop af induktionsmotorer med en fasevikling af rotoren, induktions-egern-burmotorer med øget effekt, jævnstrømsmotorer med mellem og høj effekt, multi-speed induktionsmotorer med trinstart, samt som synkronmotorer. Disse motorer er styret som en funktion af tiden, fart og nuværende.
Udover ovenstående tilfælde kan motorstyring udføres og efter stiprincippet, når motoren starter og sænker farten, når arbejdslegemet når en bestemt position i rummet.Systemer, der udfører sådanne funktioner, kaldes open-loop-systemer, fordi de ikke har nogen feedback mellem outputværdien og inputværdien.